
ОБНОВЛЕНИЯ
- v3.1: мелкие исправления
- v3.2: улучшена стабильность плавного режима
Предыдущие
- v1.1 – убраны дефайны
- v1.2 – возвращены дефайны
- v2.0:
- Программный deadtime
- Отрицательные скорости
- Поддержка двух типов драйверов и реле
- Плавный пуск и изменение скорости
- v2.1: небольшие фиксы и добавления
- v2.2: оптимизация
- v2.3: добавлена поддержка esp (исправлены ошибки)
- v2.4: совместимость с другими библами
- v2.5: добавлен тип DRIVER2WIRE_NO_INVERT
- v3.0: переделана логика minDuty, добавлен режим для ШИМ любой битности
ТЕОРИЯ
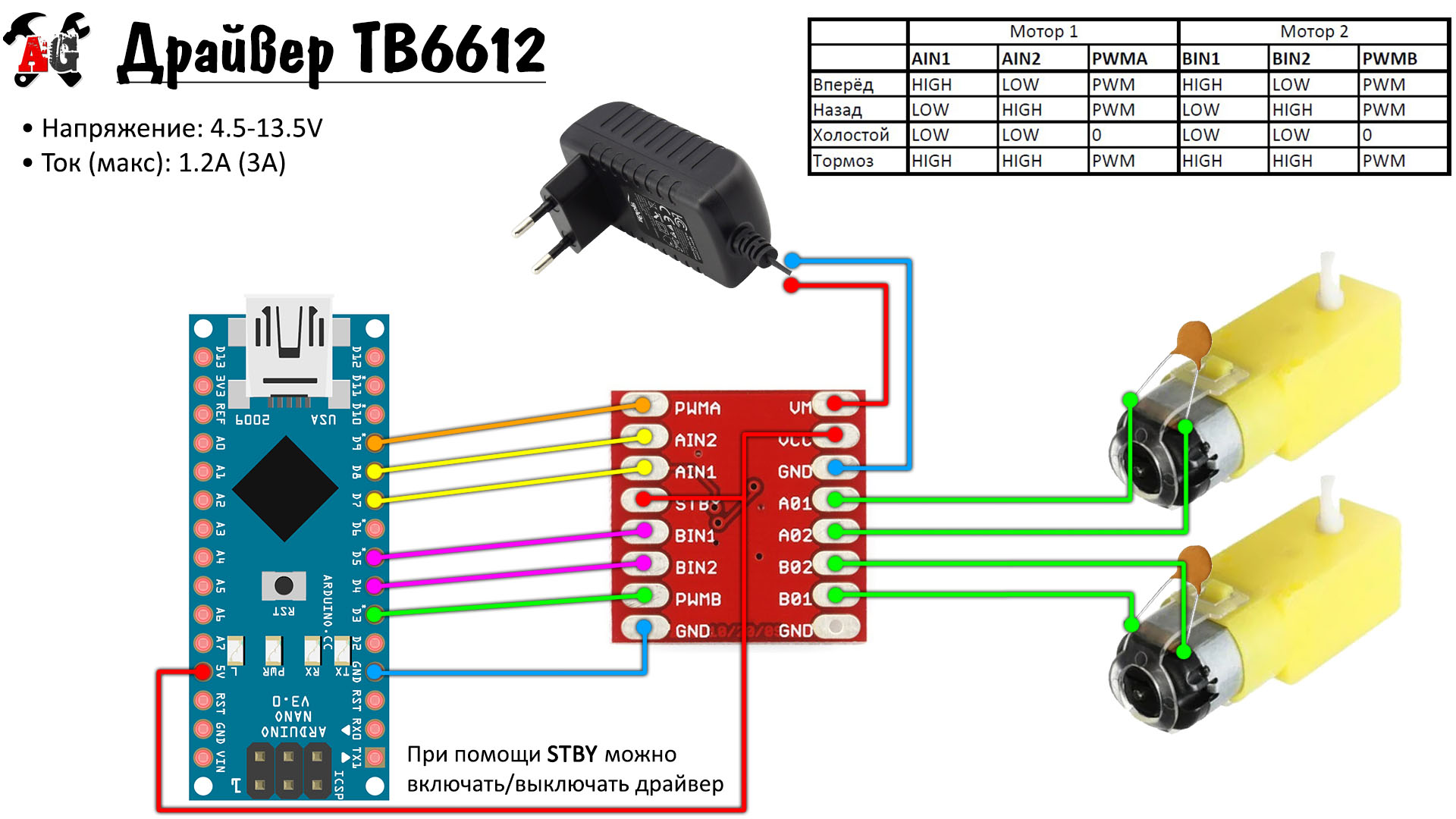
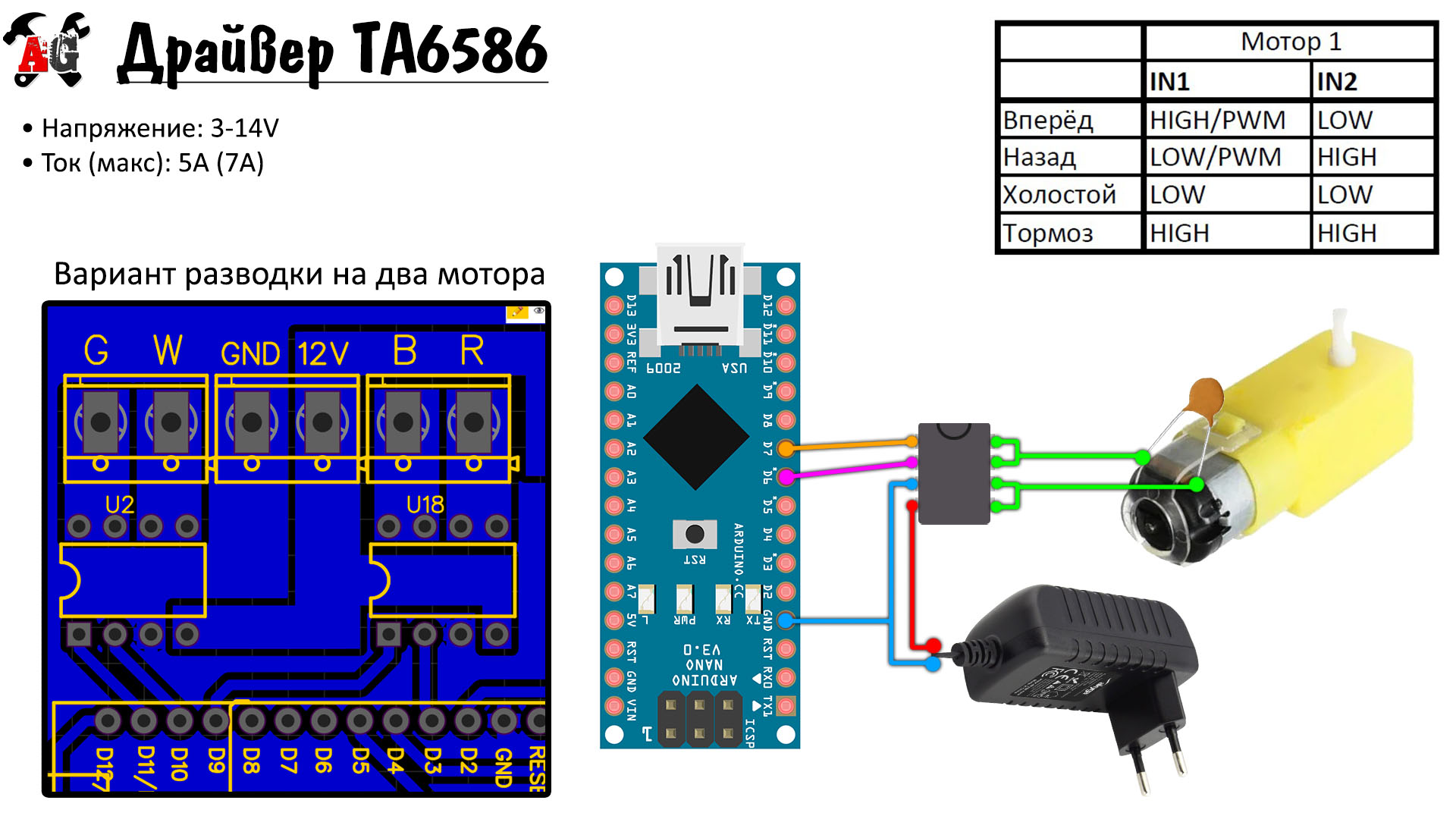
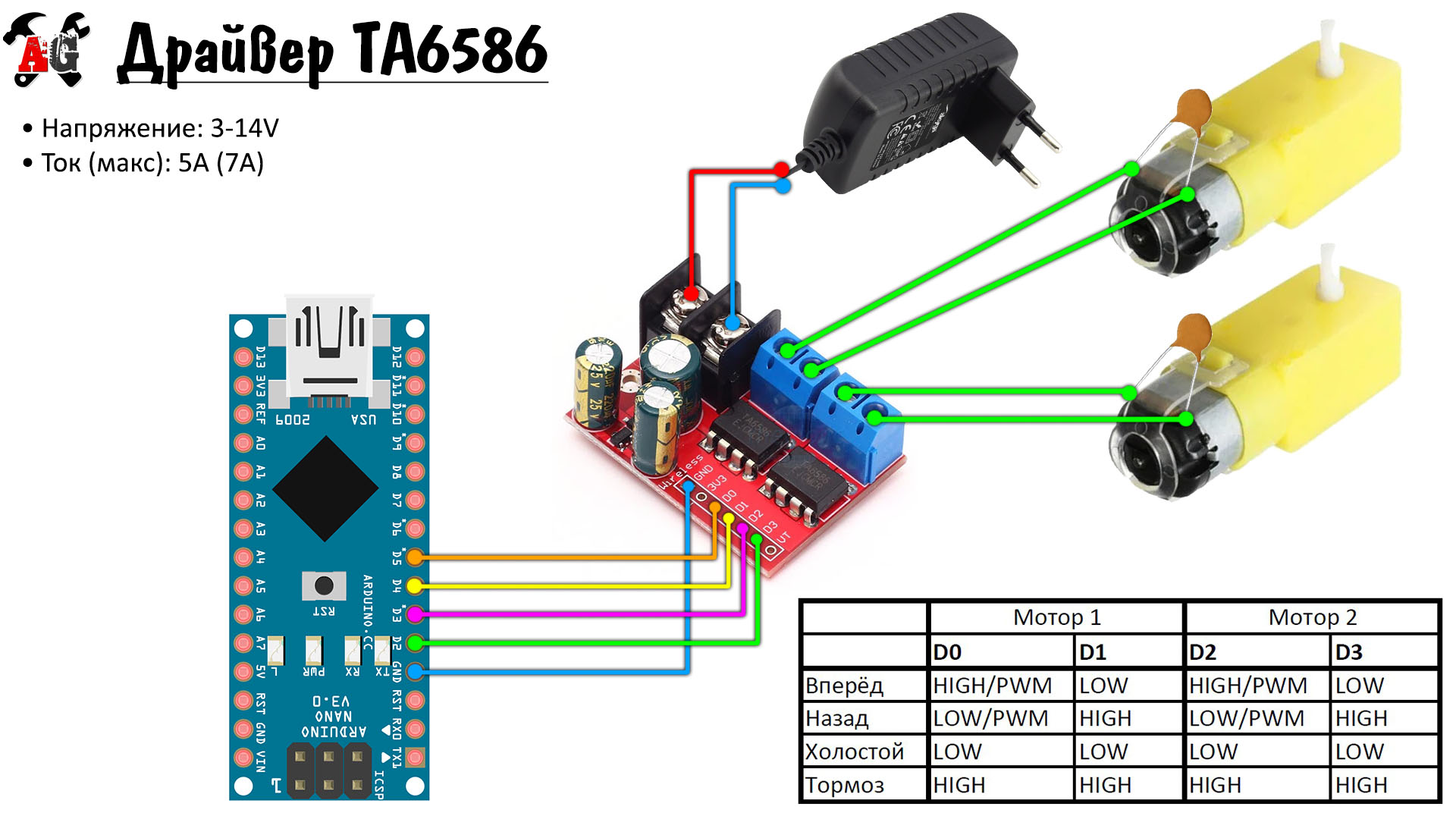
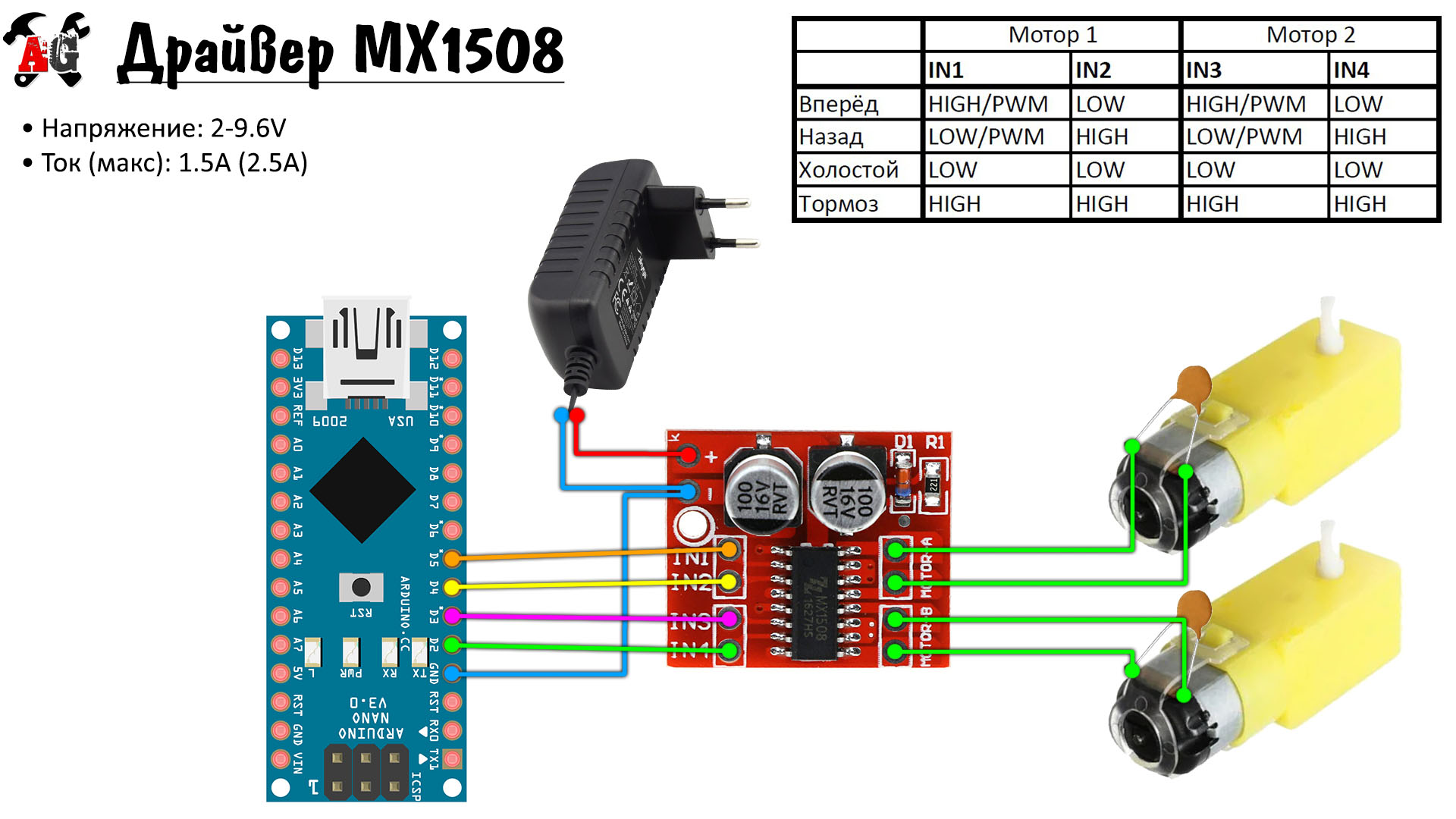
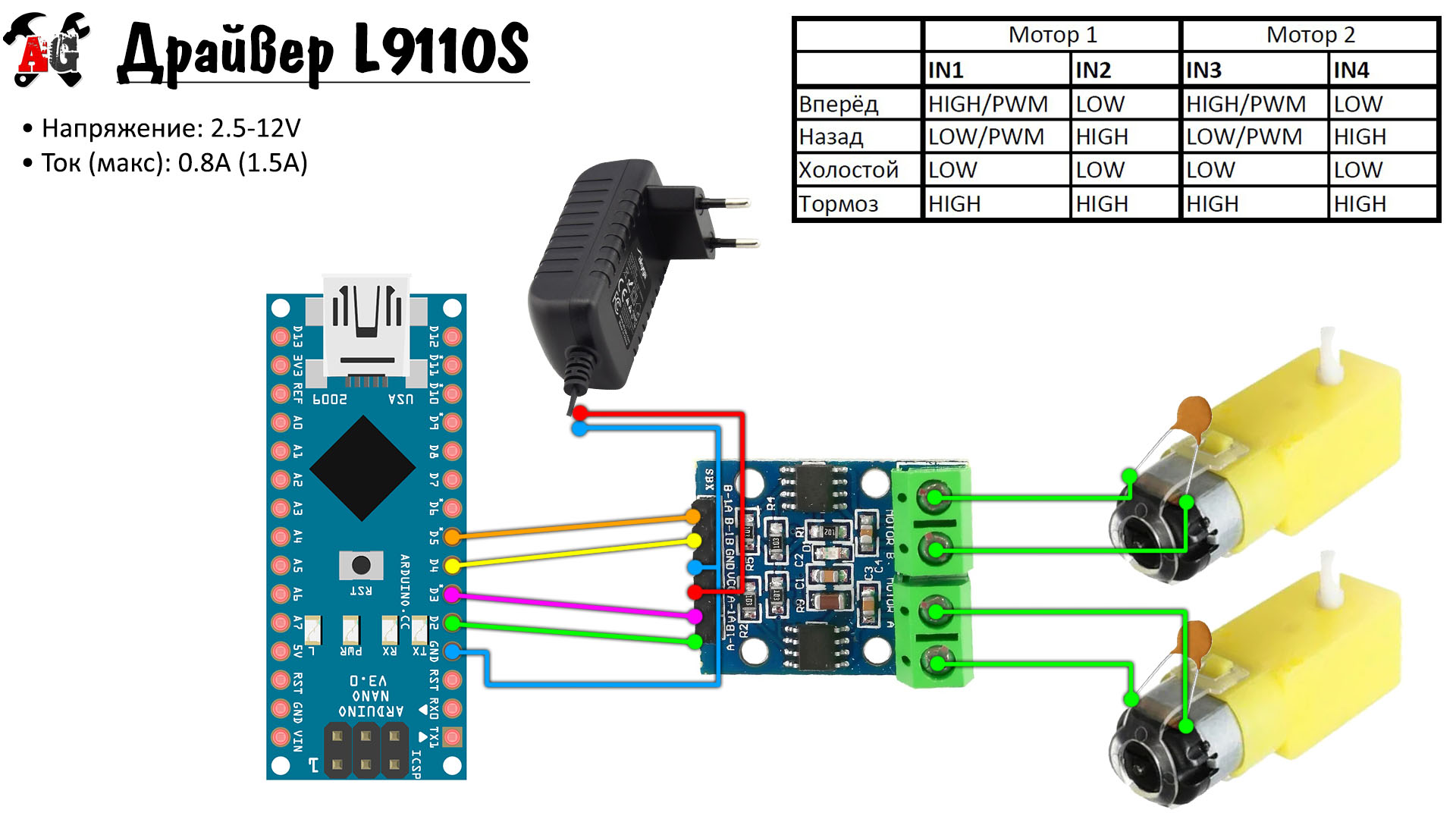
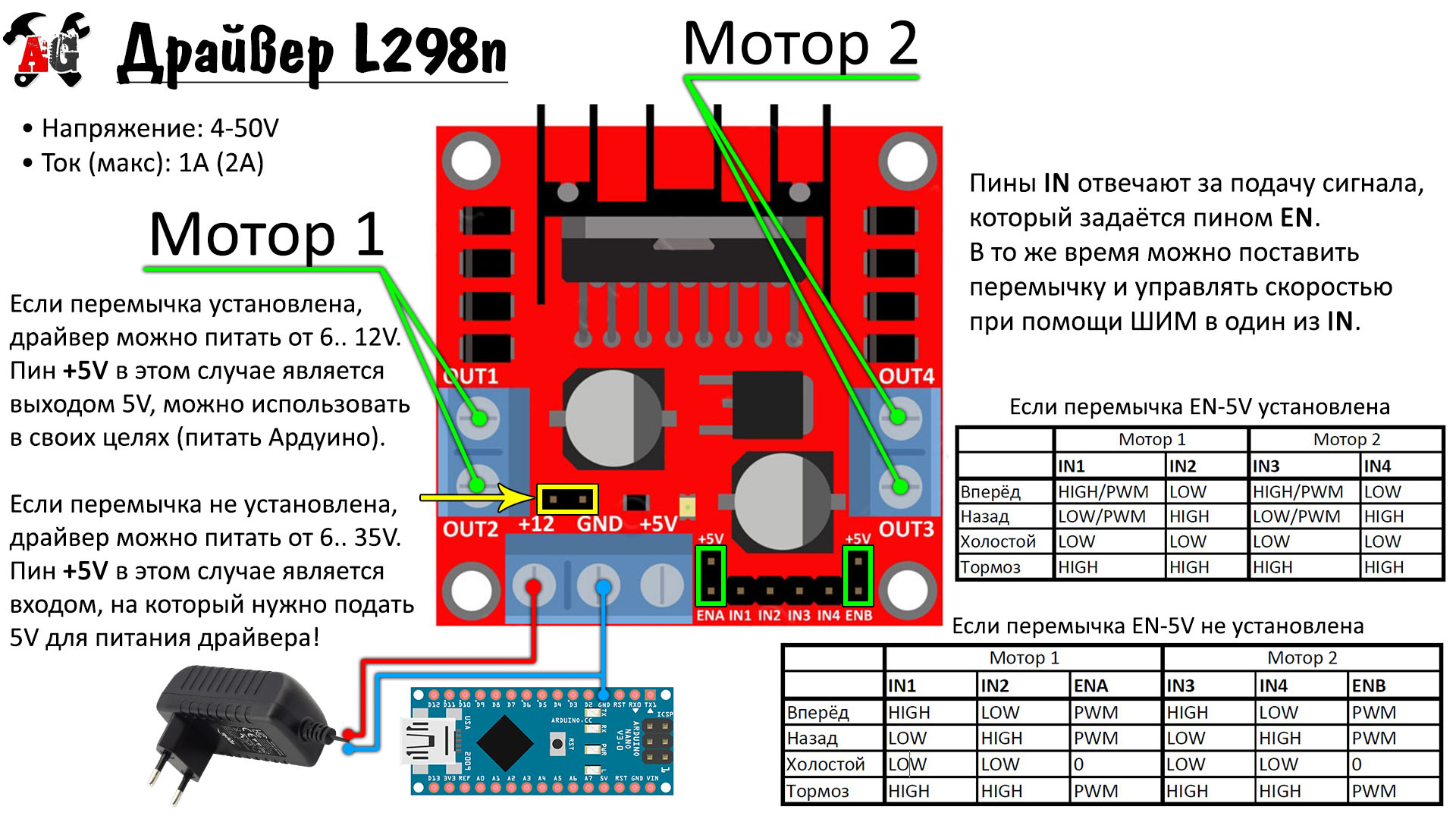
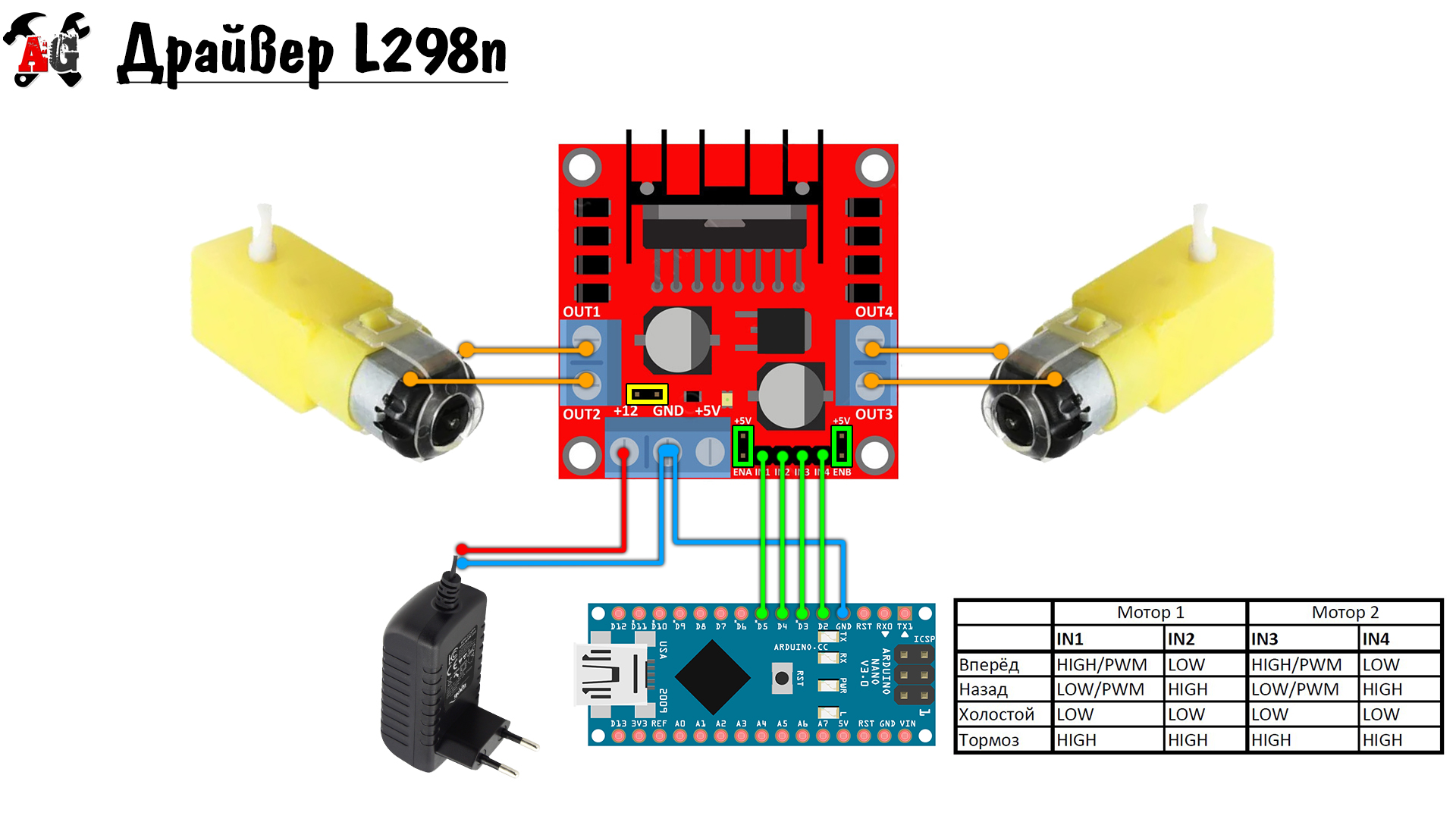
Библиотека подходит для большинства драйверов, построенных по схеме H-мост, на два мотора они обычно имеют 4 входа (по 2 на каждый). Также на сайте есть отдельный подробный урок по работе с коллекторными моторами.
БИБЛИОТЕКА

Библиотека для удобного управления моторчиками через драйвер полного моста для Arduino
- Контроль скорости и направления вращения
- Работа с 10 битным ШИМом
- Программный deadtime
- Отрицательные скорости
- Поддержка двух типов драйверов и реле
- Плавный пуск и изменение скорости
Поддерживаемые платформы: все Arduino (используются стандартные Wiring-функции).
В версии 2.2 добавлена поддержка плат на базе ESP
УСТАНОВКА
- Библиотеку можно найти и установить через менеджер библиотек по названию GyverMotor в:
- Arduino IDE (Инструменты/Управлять библиотеками)
- Arduino IDE v2 (вкладка “Library Manager”)
- PlatformIO (PIO Home, вкладка “Libraries”)
- Про ручную установку читай здесь
ДОКУМЕНТАЦИЯ
Документация
Инициализация
Библиотека поддерживает три типа драйверов:
- DRIVER2WIRE - двухпроводной драйвер (направление + ШИМ)
- DRIVER2WIRE_NO_INVERT - двухпроводной драйвер, в котором при смене направления не нужна инверсия ШИМ
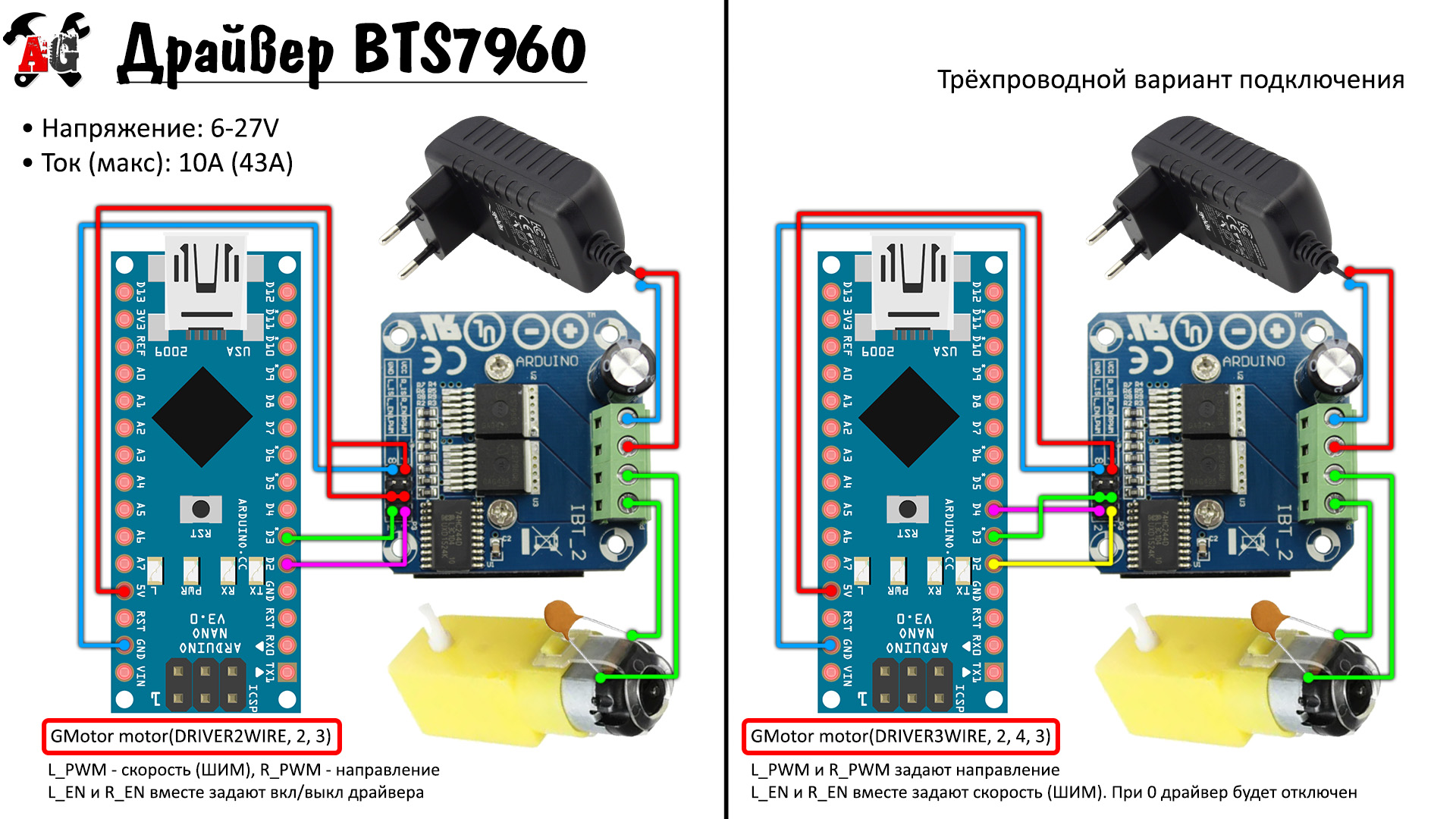
- DRIVER3WIRE - трёхпроводной драйвер (два пина направления + ШИМ)
- RELAY2WIRE - реле в качестве драйвера (два пина направления)
GMotor motor(DRIVER2WIRE, dig_pin, PWM_pin, level);GMotor motor(DRIVER3WIRE, dig_pin_A, dig_pin_B, PWM_pin, level);GMotor motor(RELAY2WIRE, dig_pin_A, dig_pin_B, level);
dig_pin,dig_pin_A,dig_pin_B- любой цифровой пин МКPWM_pin- любой ШИМ пин МКlevel- LOW / HIGH - уровень драйвера. Если при увеличении скорости мотор наоборот тормозит - смени уровень
Настройки
setDeadtime(us)- установка программного deadtime на переключение направления,usв микросекундах. По умолчанию стоит 0: deadtime отключенsetDirection(dir)- ГЛОБАЛЬНАЯ смена направления вращения мотора например чтобы FORWARD совпадал с направлением движения "вперёд" у машинки.dir- REVERSE или NORMAL (умолч.)setLevel(level)- смена уровня драйвера (аналогично при инициализации). Если при увеличении скорости мотор наоборот тормозит - смени уровень.level- LOW или HIGHsetMinDuty(duty)- минимальный сигнал (по модулю), который будет подан на мотор. Автоматически сжимает диапазон регулирования мотора: например minDuty поставили 50, и при сигнале 1 будет на мотор будет подано ~51, максимум останется прежним (диапазон сигнала переведётся в 50.. 255 внутри библиотеки).
Режим работы
У мотора есть 5 режимов работы, устанавливаются при помощи
setMode(mode), где mode:
FORWARD- вперёдBACKWARD- назадSTOP- холостой (мотор отключен)AUTO- отдать управление функции setSpeed()
Управление скоростью и направлением
Скорость устанавливается при помощи функции
setSpeed(speed). Есть два варианта управления скоростью:
- Направление в ручном режиме, скорость 0..255 (0..1023). В этом случае скорость должна быть положительной (
setSpeed(0..255)), направление вращения задаётся при помощиsetMode(). При направлении FORWARD частота оборотов растёт по мере увеличенияsetSpeed(speed), при направлении BACKWARD частота оборотов растёт в противоположную сторону по мере увеличенияsetSpeed(speed). - Направление в автоматическом режиме, скорость -255..255 (-1023..1023 для 10 бит). В этом случае устанавливаем
setMode(AUTO)и подаём скорость во всём диапазоне. При значении мотор -255 крутится с максимальной скоростью в направлении "назад", при 255 - в направлении "вперёд". При значении 0 (ноль) режим автоматически переключается на STOP. Если задан параметр minDuty (при помощиsetMinDuty()), то режим STOP будет автоматически активирован при значении скорости в пределах (-minDuty, minDuty). Пример: у нас есть мотор, экспериментально установлено, что он начинает вращаться при величине скорости больше 50 (и, соответственно, меньше -50), при меньшем значении он просто "пищит" и стоит на месте. Если мы выставимsetMinDuty(50), то в диапазоне -50..50 мотор автоматически будет находиться в режиме STOP и не будет пищать при "шуме" задающего сигнала.
Разрешение ШИМ
setSpeed(speed) может работать с ШИМ любого разрешения, для этого нужно
- Перевести таймер в режим нужного разрешения. 8 битные таймеры можно запустить только на пониженном разрешении, а 16 битный - например на 10 битах (выводы D9 и D10), смотрите пример в библиотеке и урок по частоте ШИМ. По Arduino MEGA пока что такого готового набора у меня нет.
- Настроить нужный объект класса GMotor на нужное разрешение при помощи
setResolution(bit), где bit - разрешение ШИМ в битах (по умолчанию 8). Также не забыть подключить пин драйвера ШИМ к выводу настроенного в первом пункте таймера (смотри пример).
Плавное управление скоростью
В библиотеке реализован готовый инструмент для плавного изменения скорости, что может обеспечить плавный пуск и остановку механизмов:
setSmoothSpeed(acc)- установка скорости изменения скорости (т.е. ускорения) мотораsmoothTick(speed)- данная функция сама меняет скорость мотора, плавно приближая её к указаннойspeed. Функция работает по встроенному таймеру на millis() с периодом 50 мс, то есть рекомендуется вызыватьsmoothTick(speed)не реже, чем каждые 50 мс.
Работа на esp8266
В esp8266 по умолчанию настроен 10-битный ШИМ, поэтому библиотеку нужно обязательно переключить в режим 10 бит:
motor.setResolution(10);
Список функций
GMotor(driverType type, int8_t param1 = NC, int8_t param2 = NC, int8_t param3 = NC, int8_t param4 = NC); // 4 варианта создания объекта в зависимости от драйвера: // GMotor motor(DRIVER2WIRE, dig_pin, PWM_pin, (LOW/HIGH) ) // GMotor motor(DRIVER2WIRE_NO_INVERT, dig_pin, PWM_pin, (LOW/HIGH) ) // GMotor motor(DRIVER3WIRE, dig_pin_A, dig_pin_B, PWM_pin, (LOW/HIGH) ) // GMotor motor(RELAY2WIRE, dig_pin_A, dig_pin_B, (LOW/HIGH) ) // установка скорости 0-255 (8 бит) и 0-1023 (10 бит) void setSpeed(int16_t duty); // сменить режим работы мотора: // FORWARD - вперёд // BACKWARD - назад // STOP - остановить void setMode(workMode mode); // направление вращения // NORM - обычное // REVERSE - обратное void setDirection(dir direction); // установить разрешение ШИМ в битах (по умолч 8) void setResolution(byte bit); // установить deadtime (в микросекундах). По умолч 0 void setDeadtime(uint16_t deadtime); // установить уровень драйвера (по умолч. HIGH) void setLevel(int8_t level); // плавное изменение к указанной скорости void smoothTick(int16_t duty); // скорость изменения скорости void setSmoothSpeed(uint8_t speed); // дать прямую команду мотору (без смены режима) void run(workMode mode, int16_t duty); // внутренняя переменная скважности для отладки int16_t _duty = 0;
ПРИМЕРЫ
Демо
/*
Пример управления мотором при помощи драйвера полного моста и потенциометра
*/
#include "GyverMotor.h"
GMotor motor(DRIVER2WIRE, 2, 3, HIGH);
// варианты инициализации в зависимости от типа драйвера:
// GMotor motor(DRIVER2WIRE, dig_pin, PWM_pin, (LOW / HIGH) )
// GMotor motor(DRIVER2WIRE_NO_INVERT, dig_pin, PWM_pin, (LOW / HIGH) )
// GMotor motor(DRIVER3WIRE, dig_pin_A, dig_pin_B, PWM_pin, (LOW/HIGH) )
// GMotor motor(RELAY2WIRE, dig_pin_A, dig_pin_B, (LOW/HIGH) )
/*
DRIVER2WIRE - двухпроводной драйвер (направление + ШИМ)
DRIVER2WIRE_NO_INVERT - двухпроводной драйвер, в котором при смене направления не нужна инверсия ШИМ
DRIVER3WIRE - трёхпроводной драйвер (два пина направления + ШИМ)
RELAY2WIRE - реле в качестве драйвера (два пина направления)
dig_pin, dig_pin_A, dig_pin_B - любой цифровой пин МК
PWM_pin - любой ШИМ пин МК
LOW / HIGH - уровень драйвера. Если при увеличении скорости мотор наоборот тормозит - смени уровень
*/
void setup() {
// установка программного deadtime на переключение направления, микросекунды
// по умолчанию стоит 0: deadtime отключен
// motor.setDeadtime(200);
// ГЛОБАЛЬНАЯ смена направления вращения мотора
// например чтобы FORWARD совпадал с направлением движения "вперёд" у машинки
motor.setDirection(REVERSE);
motor.setDirection(NORMAL); // умолч.
// смена режима работы мотора
motor.setMode(FORWARD); // вперёд
motor.setMode(BACKWARD); // назад
motor.setMode(STOP); // стоп, холостой (мотор отключен)
// смена уровня драйвера (аналогично при инициализации)
// Если при увеличении скорости мотор наоборот тормозит - смени уровень
motor.setLevel(LOW);
motor.setLevel(HIGH); // по умолч.
// для работы в 10 бит необходимо также настроить ШИМ на 10 бит!!!
// читай тут https://alexgyver.ru/lessons/pwm-overclock/
// motor.setResolution(10);
// минимальный сигнал (по модулю), который будет подан на мотор
// Избавляет от ситуаций, когда мотор покоится и "пищит"
motor.setMinDuty(150);
// ключ на старт!
motor.setMode(FORWARD);
}
void loop() {
// потенциометр на А0
// преобразуем значение в -255.. 255
int val = 255 - analogRead(0) / 2;
// установка скорости:
// * (0..255) при ручном выборе направления (setMode: FORWARD/BACKWARD)
// * (-255..255) при автоматическом (поставить setMode(FORWARD))
// * (0..1023) в режиме 10 бит при ручном выборе направления (setMode: FORWARD/BACKWARD)
// * (-1023..1023) в режиме 10 бит при автоматическом (поставить setMode(FORWARD))
motor.setSpeed(val);
// в данном случае мотор будет остановлен в среднем положении рукоятки
// и разгоняться в противоположные скорости в крайних её положениях
delay(10); // задержка просто для "стабильности"
}
Контроль скорости 10 бит
/*
Пример управления мотором при помощи драйвера полного моста и потенциометра
на ШИМ 10 бит
*/
#include "GyverMotor.h"
GMotor motor(DRIVER2WIRE, 2, 9, HIGH);
// варианты инициализации в зависимости от типа драйвера:
// GMotor motor(DRIVER2WIRE, dig_pin, PWM_pin, (LOW / HIGH) )
// GMotor motor(DRIVER3WIRE, dig_pin_A, dig_pin_B, PWM_pin, (LOW/HIGH) )
// GMotor motor(RELAY2WIRE, dig_pin_A, dig_pin_B, (LOW/HIGH) )
/*
DRIVER2WIRE - двухпроводной драйвер (направление + ШИМ)
DRIVER3WIRE - трёхпроводной драйвер (два пина направления + ШИМ)
RELAY2WIRE - реле в качестве драйвера (два пина направления)
dig_pin, dig_pin_A, dig_pin_B - любой цифровой пин МК
PWM_pin - любой ШИМ пин МК
LOW / HIGH - уровень драйвера. Если при увеличении скорости мотор наоборот тормозит - смени уровень
*/
void setup() {
// разгоняем ШИМ на пинах 9 и 10 (atmega328) до 16 кГц 10 бит
// читай тут: https://alexgyver.ru/lessons/pwm-overclock/
TCCR1A = 0b00000011; // 10bit
TCCR1B = 0b00001001; // x1 fast pwm
// активируем 10-битный режим библиотеки
motor.setResolution(10);
// ключ на старт!
motor.setMode(FORWARD);
}
void loop() {
// потенциометр на А0
// преобразуем значение в -1023.. 1023
int val = 1023 - analogRead(0) * 2;
motor.setSpeed(val);
// в данном случае мотор будет остановлен в среднем положении рукоятки
// и разгоняться в противоположные скорости в крайних её положениях
delay(10); // задержка просто для "стабильности"
}
Плавное управление
/*
Пример плавного управления мотором при помощи драйвера полного моста и потенциометра
*/
#include "GyverMotor.h"
GMotor motor(DRIVER2WIRE, 2, 3, HIGH);
// варианты инициализации в зависимости от типа драйвера:
// GMotor motor(DRIVER2WIRE, dig_pin, PWM_pin, (LOW / HIGH) )
// GMotor motor(DRIVER3WIRE, dig_pin_A, dig_pin_B, PWM_pin, (LOW/HIGH) )
// GMotor motor(RELAY2WIRE, dig_pin_A, dig_pin_B, (LOW/HIGH) )
/*
DRIVER2WIRE - двухпроводной драйвер (направление + ШИМ)
DRIVER3WIRE - трёхпроводной драйвер (два пина направления + ШИМ)
RELAY2WIRE - реле в качестве драйвера (два пина направления)
dig_pin, dig_pin_A, dig_pin_B - любой цифровой пин МК
PWM_pin - любой ШИМ пин МК
LOW / HIGH - уровень драйвера. Если при увеличении скорости мотор наоборот тормозит - смени уровень
*/
void setup() {
Serial.begin(9600);
// установка скорости изменения скорости (ускорения) мотора
motor.setSmoothSpeed(20);
// ключ на старт!
motor.setMode(FORWARD);
}
void loop() {
// потенциометр на А0
// преобразуем значение в -255.. 255
int val = 255 - analogRead(0) / 2;
// данную функцию рекомендуется вызывать чаще чем каждые 50 мс
// (работает по встроенному таймеру)
// она будет плавно менять скорость мотора к заданной
motor.smoothTick(val);
// отладка. Откройте Инструменты/Плоттер по последовательному порту
Serial.print(val); // первый график - установленная скорость
Serial.print(',');
Serial.println(motor._duty); // второй график - реальный сигнал на мотор
delay(10); // задержка просто для "стабильности"
} ВИДЕО
ПОДДЕРЖАТЬ
Вы можете поддержать меня за создание доступных проектов с открытым исходным кодом, полный список реквизитов есть вот здесь.
4.5/5 - (4 голоса)