
Сервопривод, он же сервомашинка, он же просто серво – простейший "модельный" актуатор, использовался в радиоуправляемых моделях ещё до появления Ардуино. Сервопривод поворачивает свой выходной вал в диапазоне ~180 градусов и обладает вполне приличным моментом: может поворачивать части механизмов (руль высоты самолёта, колёса машинки, подвес камеры), нажимать кнопки и так далее.
 |
В наборе GyverKIT | START | IOT | EXTRA |
|---|---|---|---|---|
| Серво | ✔ | ✔ | ✔ |
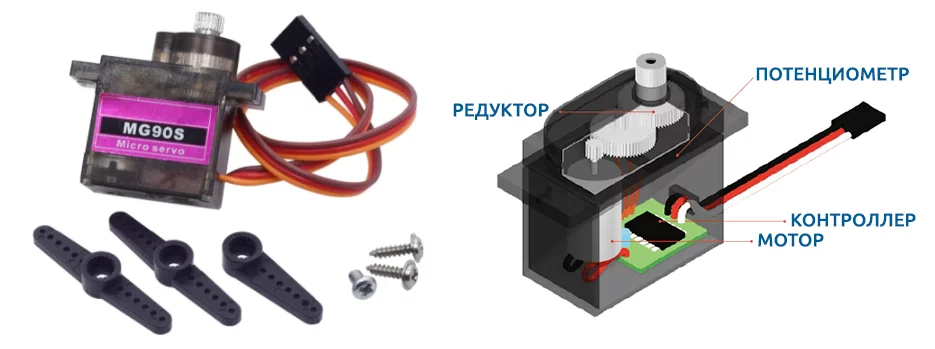
В маленьком корпусе располагаются:
- Коллекторный моторчик
- Редуктор (пластиковый или металлический)
- Потенциометр обратной связи
- Контроллер (драйвер мотора, обратная связь, управление по интерфейсу PWM)
- Серво комплектуется набором "качалок" и винтами для крепления
Характеристики 9-граммового сервопривода:
- Напряжение питания: 3.. 7.2V
- Крутящий момент:
- 1.2кг/см при 4.8V
- 1.6кг/см при 6.0V
- Рабочий угол: 160.. 180 градусов
- Скорость (без нагрузки): 180 градусов за 0.3с
- Интерфейс: PWM
Подключение к Arduino #
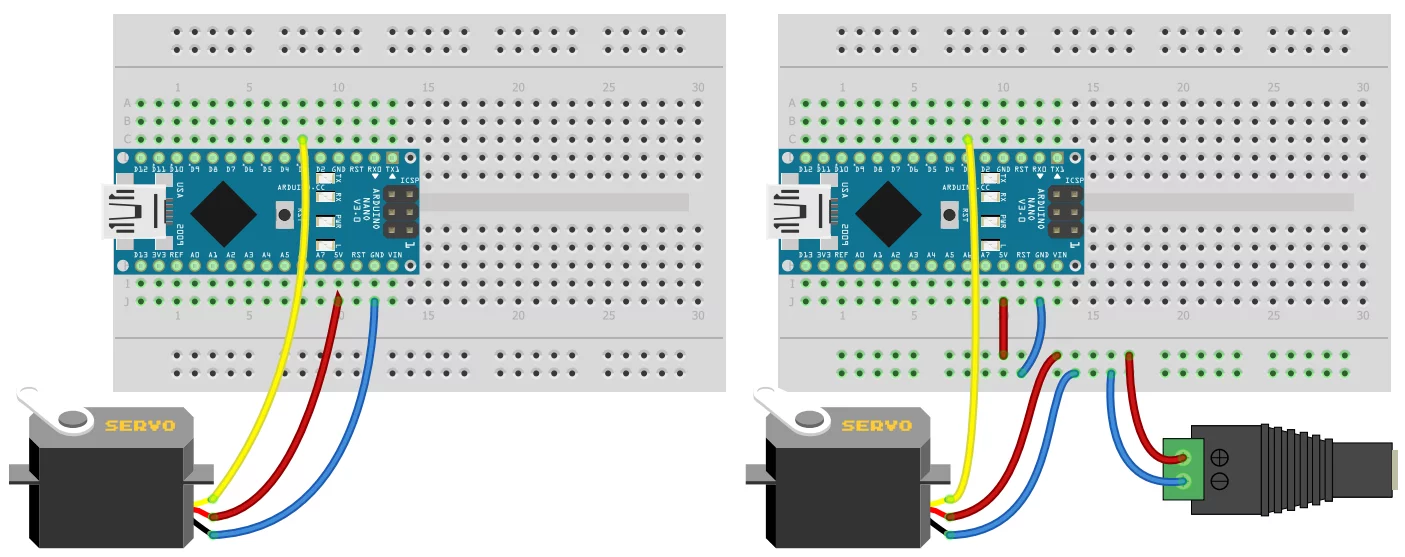
Провода:
- Коричневый: GND
- Красный: VCC
- Жёлтый: любой цифровой пин
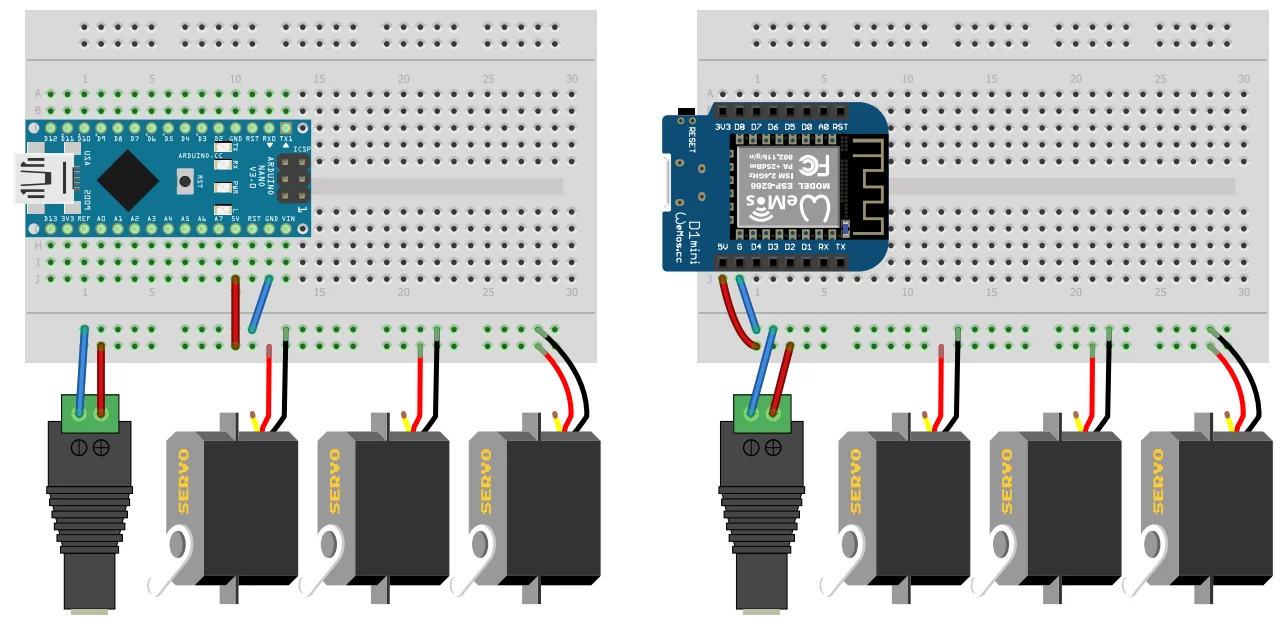
Сервопривод потребляет довольно приличный ток (стартовый до 1А), поэтому рекомендуется питать его от внешнего источника. При питании от компьютера напряжение может просесть и МК перезагрузится, при высокой нагрузке (с 2 и больше приводов) может выгореть защитный диод на плате Arduino!
Программирование #
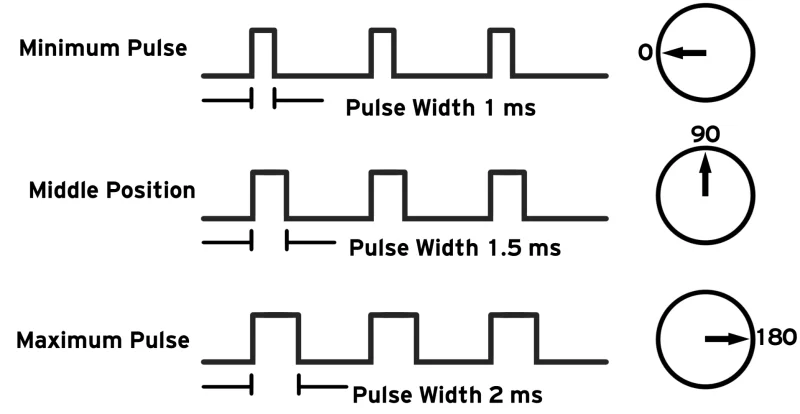
Сервопривод управляется ШИМ сигналом, точнее длиной импульса: минимальная (0 градусов) и максимальная (~180 градусов) длина импульса колеблется в зависимости от модели и производителя сервопривода - обычно что то в районе 500 мкс минимум и 2500 мкс максимум. Импульсы подаются с частотой около 50 Гц:
По сути для управления серво достаточно подавать на пин сигнал с нужными интервалами, например рассмотрим вот такую схему с серво на пине D3 и потенциометром на A0:
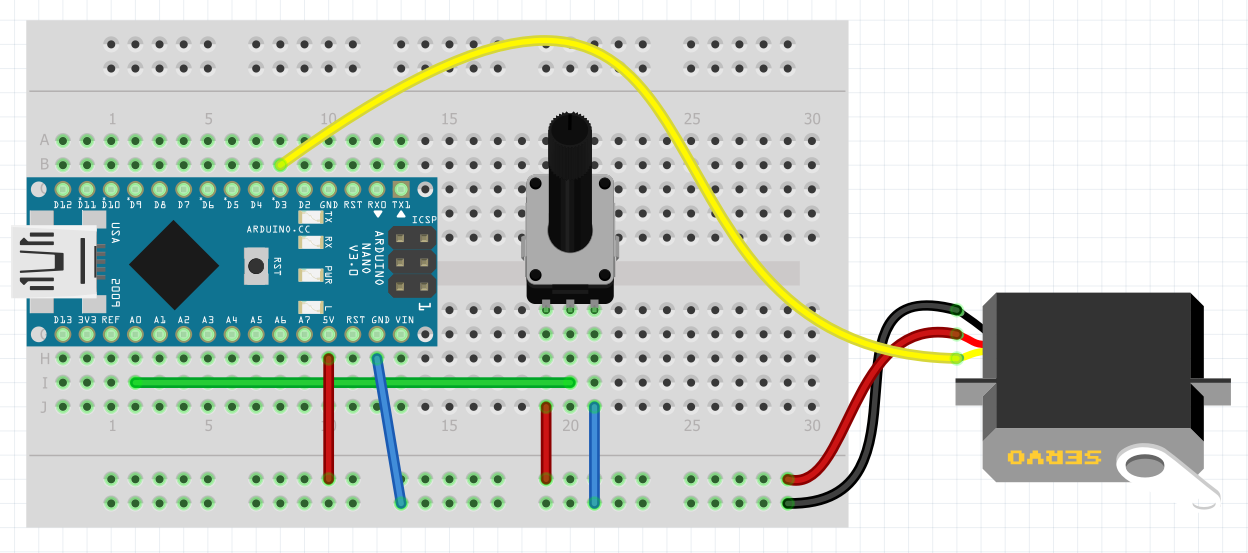
И напишем программу, которая будет поворачивать серво вслед за потенциометром:
#define SERVO_PIN 3
#define POT_PIN 0
void setup() {
pinMode(SERVO_PIN, OUTPUT);
}
void loop() {
int pulse = map(analogRead(POT_PIN), 0, 1023, 500, 2500);
digitalWrite(SERVO_PIN, HIGH);
delayMicroseconds(pulse);
digitalWrite(SERVO_PIN, LOW);
delay(20); // 50 Hz
}Такая программа сможет только управлять одним сервоприводом, т.к. организована на задержках. Для написания более сложных программ нужно использовать асинхронные инструменты.
Библиотеки #
Servo.h- стандартная библиотека (встроена в Arduino IDE). Работает полностью асинхронно на прерываниях и поддерживает до 12 приводов- SoftServo - моя библиотека, работает на миллисе. Может пригодиться, если не хочется терять Timer 1 у Arduino NANO
Servo.h #
На Arduino NANO эта библиотека использует первый таймер (Timer 1) , т.е. ШИМ на пинах 9 и 10 использовать с ней нельзя!
Подключаем и создаём объект сервопривода:
#include <Servo.h>
Servo myservo;Библиотека имеет следующие методы:
uint8_t attach(int pin); // "подключить" с указанием пина
uint8_t attach(int pin, int min, int max); // "подключить" с указанием пина и мин. макс. сигнала
void detach(); // отключить
void write(int value); // повернуть на угол в градусах
void writeMicroseconds(int value); // повернуть на длину импульсаПри "подключении" серво через attach(pin) диапазон длины импульса устанавливается стандартный: 544.. 2400 мкс (задан в библиотеке). Если есть желание настроить серво идеально, чтобы она работала на весь диапазон – нужно попробовать покрутить её через writeMicroseconds(): в крайних значениях диапазона и найти минимум и максимум, при которых серво упирается.
Крутим туда сюда быстро
#include <Servo.h>
Servo myservo;
void setup() {
myservo.attach(3); // подключаем на пин 3
}
void loop() {
myservo.write(0); // поворот на 0 градусов
delay(1000);
myservo.write(180); // поворот на 180 градусов
delay(1000);
}Крутим туда сюда плавно
#include <Servo.h>
Servo myservo;
void setup() {
myservo.attach(3);
}
void loop() {
for (int i = 0; i <= 180; i++) {
myservo.write(i);
delay(15);
}
for (int i = 180; i > 0; i--) {
myservo.write(i);
delay(15);
}
}Крутим туда сюда плавно асинхронно
#include <Servo.h>
Servo myservo;
void setup() {
myservo.attach(3);
}
uint32_t tmr; // переменная таймера
int val = 0; // переменная яркости
int dir = 2; // скорость и направление яркости
void loop() {
// асинхронный таймер на миллис
if (millis() - tmr >= 20) {
tmr = millis();
val += dir; // прибавляем скорость
if (val >= 180 || val <= 0) dir = -dir; // разворачиваем
myservo.write(val); // применяем
}
}Полезные страницы #
- Набор GyverKIT – наш большой стартовый набор Arduino, продаётся в России
- Каталог ссылок на дешёвые Ардуины, датчики, модули и прочие железки с AliExpress
- Обратная связь – сообщить об ошибке в уроке или предложить дополнение по тексту ([email protected])
- Поддержать автора за работу над уроками