
Урок устарел
Читайте новый подробный урок про реле.
ОБНОВЛЕНИЯ
- v2.1 — исправлена getResultTimer
ТЕОРИЯ
Это библиотека не для модулей реле (им не нужны библиотеки), это библиотека для релейного регулятора, т.е. реализация релейного закона регулирования с гистерезисом и обратной связью по скорости изменения величины через коэффициент усиления. Что позволяет делать релейный регулятор:
- Управлять какой-то величиной, включая и выключая орган управления (температура – обогреватель или холодильник, влажность – увлажнитель, и так далее)
- Гистерезис – “окно” вокруг установленного значения, чтобы уменьшить количество включений/выключений реле (управляющего устройства)
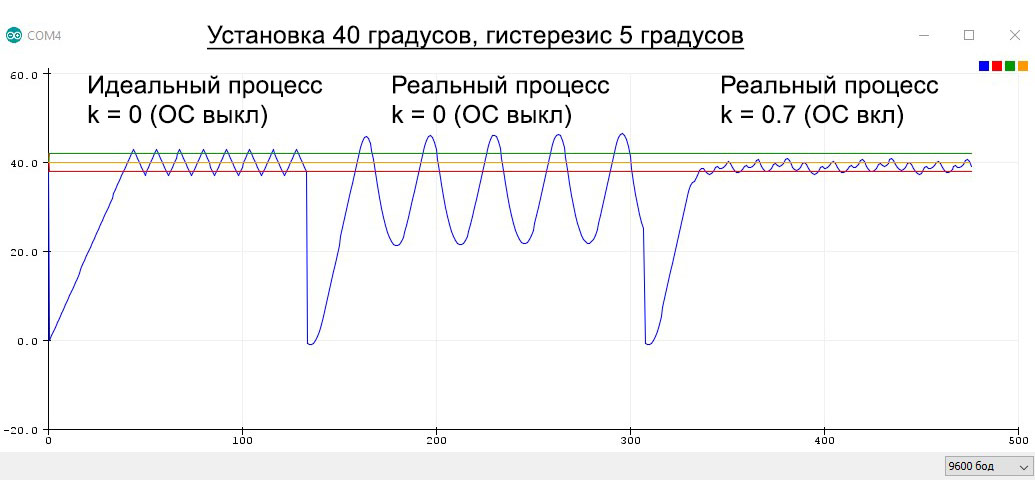
- Обратная связь (ОС) по изменению – в библиотеку встроено автоматическое вычисление производной измеряемой величины. Подобрав коэффициент усиления ОС можно добиться максимальной стабильности и точности удержания заданной величины: обратная связь по изменению позволяет отключать управляющее устройство до перехода через заданную величину снизу, и заранее включать при приближении к ней сверху
БИБЛИОТЕКА

Библиотека классического релейного регулятора для Arduino
- Обратная связь по скорости изменения величины
- Настройка гистерезиса, коэффициента усиления ОС, направления регулирования
- Возвращает результат по встроенному таймеру или в ручном режиме
Поддерживаемые платформы: все Arduino (используются стандартные Wiring-функции)
УСТАНОВКА
- Библиотеку можно найти и установить через менеджер библиотек по названию GyverRelay в:
- Arduino IDE (Инструменты/Управлять библиотеками)
- Arduino IDE v2 (вкладка «Library Manager»)
- PlatformIO (PIO Home, вкладка «Libraries»)
- Про ручную установку читай здесь
ДОКУМЕНТАЦИЯ
Документация
Инициализация
Можно создать объект с указанием направления регулированияGyverRelay regulator(REVERSE);
Можно просто
GyverRelay regulator;
Настройка
Основные параметры регулятора можно читать и изменять напрямую как члены класса:input- входная величина, например температураsetpoint- установка (к чему регулятор будет стремиться привести входную величину)output- выход (0 или 1) для управления реле (например черезdigitalWrite()). Менять его не нужно, этим занимается библиотека!
hysteresis- ширина окна (петли) гистерезиса. Гистерезис уменьшает количество переключений реле, но дестабилизирует систему.k- коэффициент обратной связи по скорости (по первой производной), подбирается вручную (0.01 ~ 100). При нулевом значении ОС отключается. ОС по скорости изменения позволяет стабилизировать систему, см. картинку в начале статьи.dT- время итерации для режима работы по встроенному таймеру.setDirection(dir)- установить направление работы регулятора:NORMAL- включаем нагрузку при переходе через значение снизу (пример: охлаждение),REVERSE- включаем нагрузку при переходе через значение сверху (пример: нагрев).
Управление
Работа релейного регулятора завязана на времени между измерениями, особенно в режиме с ОС, поэтому период расчёта должен строго соблюдаться. Библиотека имеет три функции для расчёта состояния реле, все функции возвращают состояние 0 или 1, а также изменяют состояниеoutput, которое можно использовать в коде для чтения:
compute(dt)- моментальный расчёт. Принимаетdtв секундах для режима с ОС. Можно не передаватьdt, тогда ОС не будет работать. Функция сделана для работы напрямую с расчётом, т.е. вы сами контролируете период вызова функции и передаёте его ей в миллисекундах (если нужна ОС). Демо-пример, вариант 3;getResult()- моментальный расчёт. Встроенный таймер для режима с ОС. При вызове данной функции программа сама вычисляет время с предыдущего вызова с передаёт dt в расчёт. Таким образом нужно просто позаботиться о периодичности вызова этой функции, dt в расчёт она передаёт сама. Демо-пример, вариант 1;getResultTimer()- расчёт по встроенному таймеру, самый простой в использовании вариант: делает расчёт и возвращает новое значение по своему собственному таймеру, а пока таймер не сработал - возвращает результат предыдущего расчёта. Т.е. эту функцию можно вызывать постоянно, новое значение она отдаст только когда придёт время. Демо-пример, вариант 2.
Список функций
GyverRelay(boolean direction = REVERSE); // NORMAL - включаем нагрузку при переходе через значение снизу (пример: охлаждение) // REVERSE - включаем нагрузку при переходе через значение сверху (пример: нагрев) // расчёт возвращает состояние для управляющего устройства (реле, транзистор) (1 вкл, 0 выкл) boolean compute(float dt = 0); // моментальный расчёт. Принимает dt в секундах для режима с ОС boolean getResult(); // моментальный расчёт. Встроенный таймер для режима с ОС boolean getResultTimer(); // расчёт по встроенному таймеру void setDirection(boolean dir); // направление регулирования (NORMAL, REVERSE) float input = 0; // сигнал с датчика (например температура, которую мы регулируем) float setpoint = 0; // заданная величина, которую должен поддерживать регулятор (температура) boolean output = 0; // выход регулятора (0 или 1) float hysteresis = 0; // ширина окна гистерезиса float k = 0; // коэффициент усиления по скорости (по умолч. 0) int16_t dT = 1000; // время итерации, мс (по умолч. секунда)
ПРИМЕРЫ
Остальные примеры смотри в папке examples библиотеки, также примеры можно открыть из Arduino IDE/Файл/Примеры
Демо - все возможности библиотеки с комментариями
/*
Пример работы релейного регулятора в автоматическом режиме по встроенному таймеру
Давайте представим, что на 3 пине у нас спираль нагрева, подключенная через реле
И есть какой то абстрактный датчик температуры, на который влияет спираль
*/
#include "GyverRelay.h"
// установка, гистерезис, направление регулирования
GyverRelay regulator(REVERSE);
// либо GyverRelay regulator(); без указания направления (будет REVERSE)
void setup() {
pinMode(3, OUTPUT); // пин реле
regulator.setpoint = 40; // установка (ставим на 40 градусов)
regulator.hysteresis = 5; // ширина гистерезиса
regulator.k = 0.5; // коэффициент обратной связи (подбирается по факту)
//regulator.dT = 500; // установить время итерации для getResultTimer
}
// вариант с delay
void loop() {
int temp; // например читаем с датчика температуру
regulator.input = temp; // сообщаем регулятору текущую температуру
// getResult возвращает значение для управляющего устройства
digitalWrite(3, regulator.getResult()); // отправляем на реле (ОС работает по своему таймеру)
delay(100);
}
/*
// вариант со встроенным таймером
void loop() {
int temp; // например читаем с датчика температуру
regulator.input = temp; // сообщаем регулятору текущую температуру
// getResult возвращает значение для управляющего устройства
digitalWrite(3, regulator.getResultTimer()); // отправляем на реле
// также можно получить значение с выхода регулятора
// regulator
}
*/
/*
// вариант со своим таймером
void loop() {
static uint32_t myTimer = 0;
if (millis() - myTimer > 2000) { // свой таймер на миллис, 2 секунды
myTimer = millis();
int temp; // например читаем с датчика температуру
regulator.input = temp; // сообщаем регулятору текущую температуру
// getResult возвращает значение для управляющего устройства
digitalWrite(3, regulator.compute(2)); // отправляем на реле. Время передаём вручную, у нас 2 секунды
}
}
*/
Симуляция (см. через плоттер порта)
/*
Симуляция работы реле. Обнули k и увидишь, как регулятор
перестанет справляться с инерционной системой
*/
#include "GyverRelay.h"
GyverRelay regulator(REVERSE);
void setup() {
Serial.begin(9600);
regulator.setpoint = 40;
regulator.hysteresis = 5;
regulator.k = 0.5;
}
boolean state = 0;
float value = 0;
void loop() {
process();
regulator.input = value;
state = regulator.getResult();
Serial.print(value);
Serial.print(' ');
Serial.print(regulator.setpoint - 5 / 2);
Serial.print(' ');
Serial.print(regulator.setpoint + 5 / 2);
Serial.print(' ');
Serial.println(regulator.setpoint);
delay(100);
}
void process() {
static float coef = 0;
coef += state ? 0.3 : -0.6;
if (coef > 2.0) coef = 2.0;
if (coef < -3.0) coef = -3;
value += coef;
} ВИДЕО
ПОДДЕРЖАТЬ
Вы можете поддержать меня за создание доступных проектов с открытым исходным кодом, полный список реквизитов есть вот здесь.
(4 голоса)

![Работа по таймеру в Arduino. GyverTimer [12.11.19]](https://alexgyver.ru/wp-content/uploads/2021/06/gyvertimer.jpg)