ОПИСАНИЕ
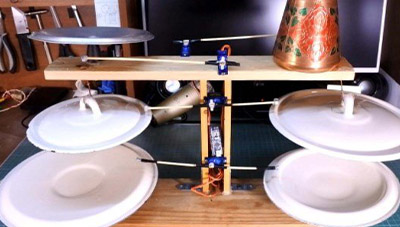
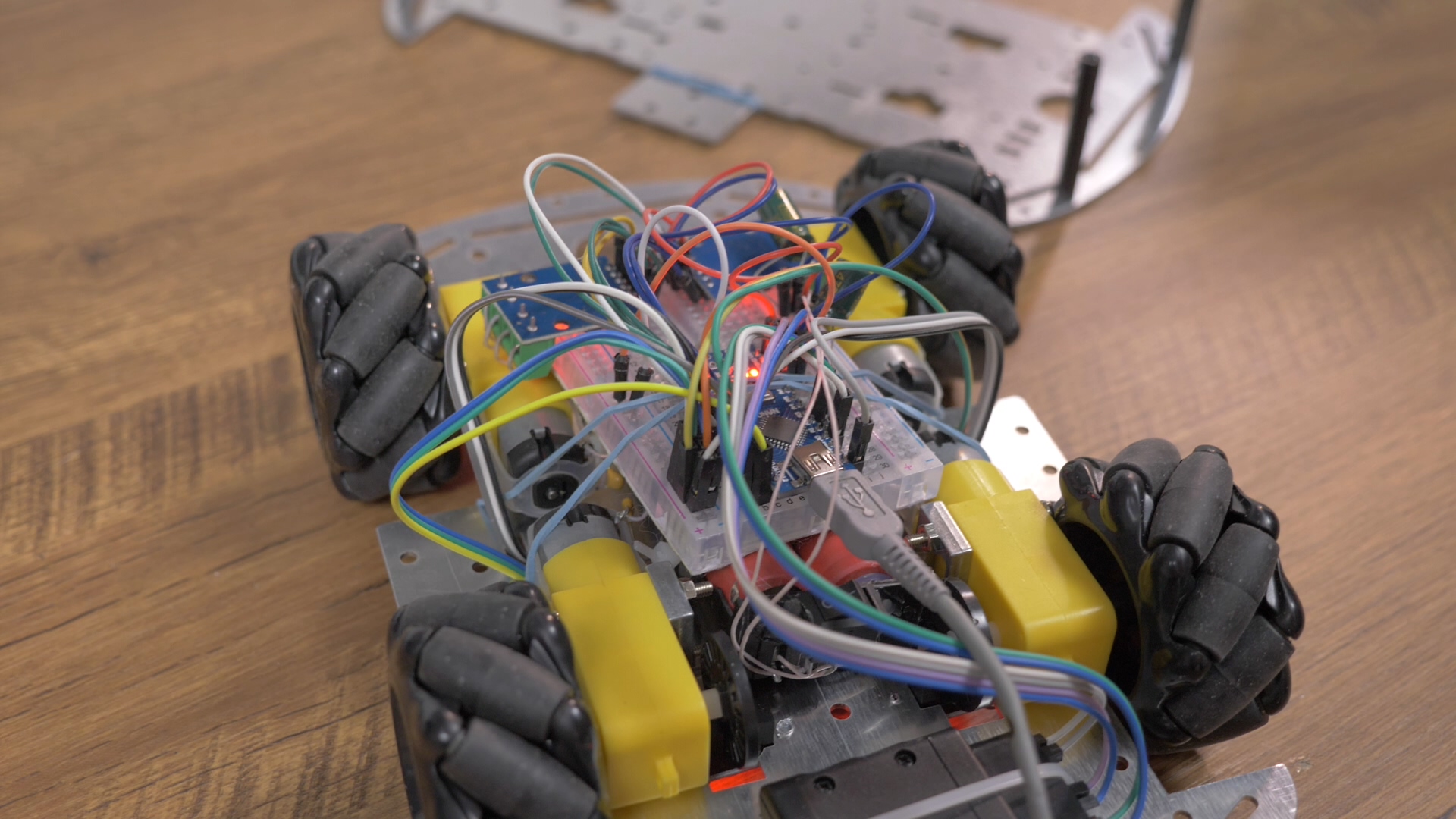
Платформа на всенаправленных колёсах под управлением Arduino. Реализовано:
- Управление с геймпада от второй плойки
- Поддержка энкодеров. Прошивка от этой версии позволяет четко управлять скоростями моторов и отправлять платформу на указанное расстояние
ВИДЕО
КОМПОНЕНТЫ
Стараюсь оставлять ссылки только на проверенные крупные магазины, из которых заказываю сам. Также по первые ссылки ведут по возможности на минимальное количество магазинов, чтобы минимально платить за доставку. Если какие-то ссылки не работают, можно поискать аналогичную железку в каталоге Ардуино модулей. Также проект можно попробовать собрать из компонентов моего набора GyverKIT.
- Готовая машинка https://ali.ski/FlZLl
- Сборная платформа https://ali.ski/H9b0X8
Arduino Nano ATMega328: купить в РФ, aliexpress, aliexpress, искать
Драйвер MX1508: aliexpress, aliexpress, искать
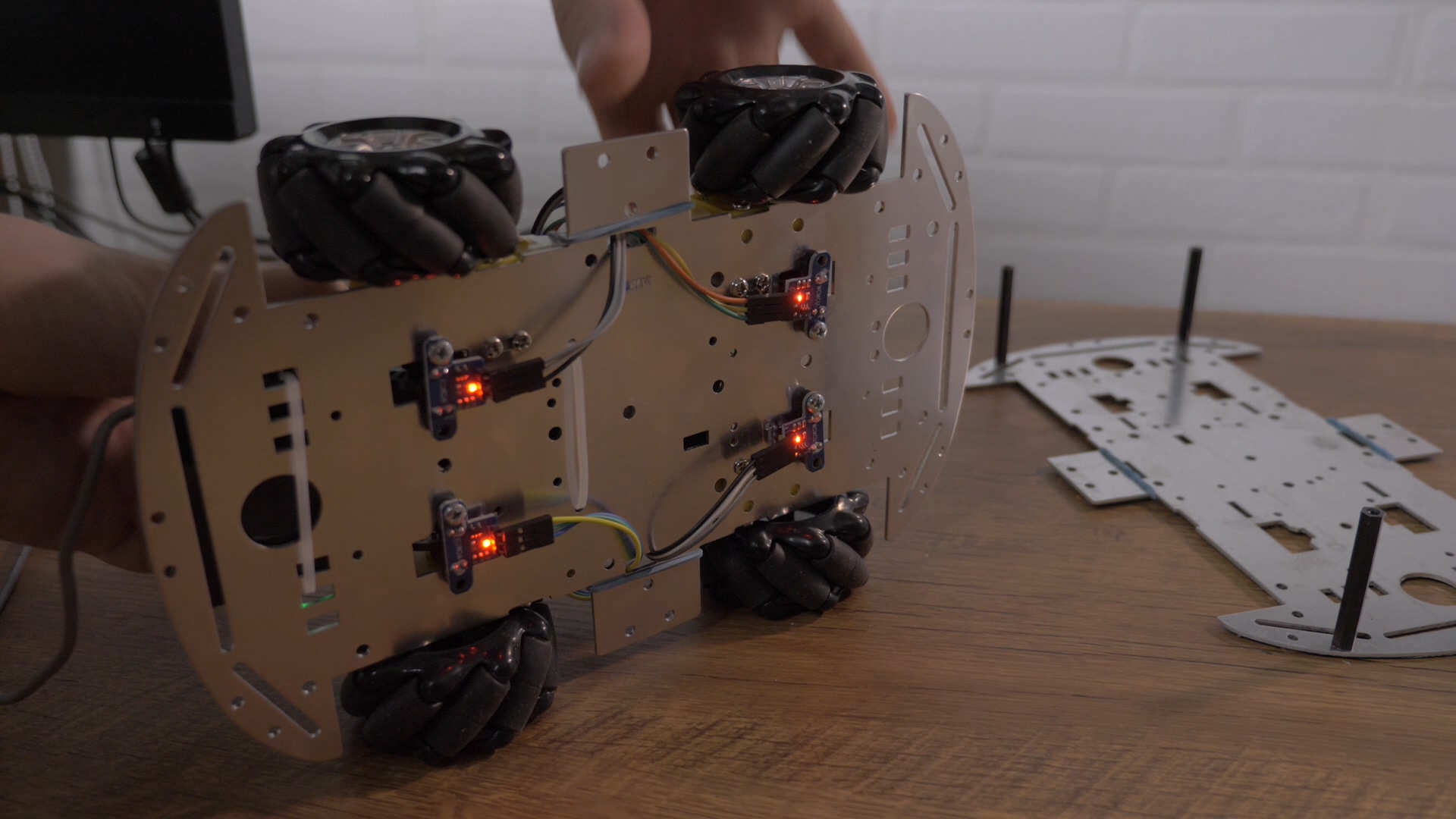
- Щелевой датчик – искать
- Колесо энкодера – искать
- Геймпад https://ali.ski/ziPZI5
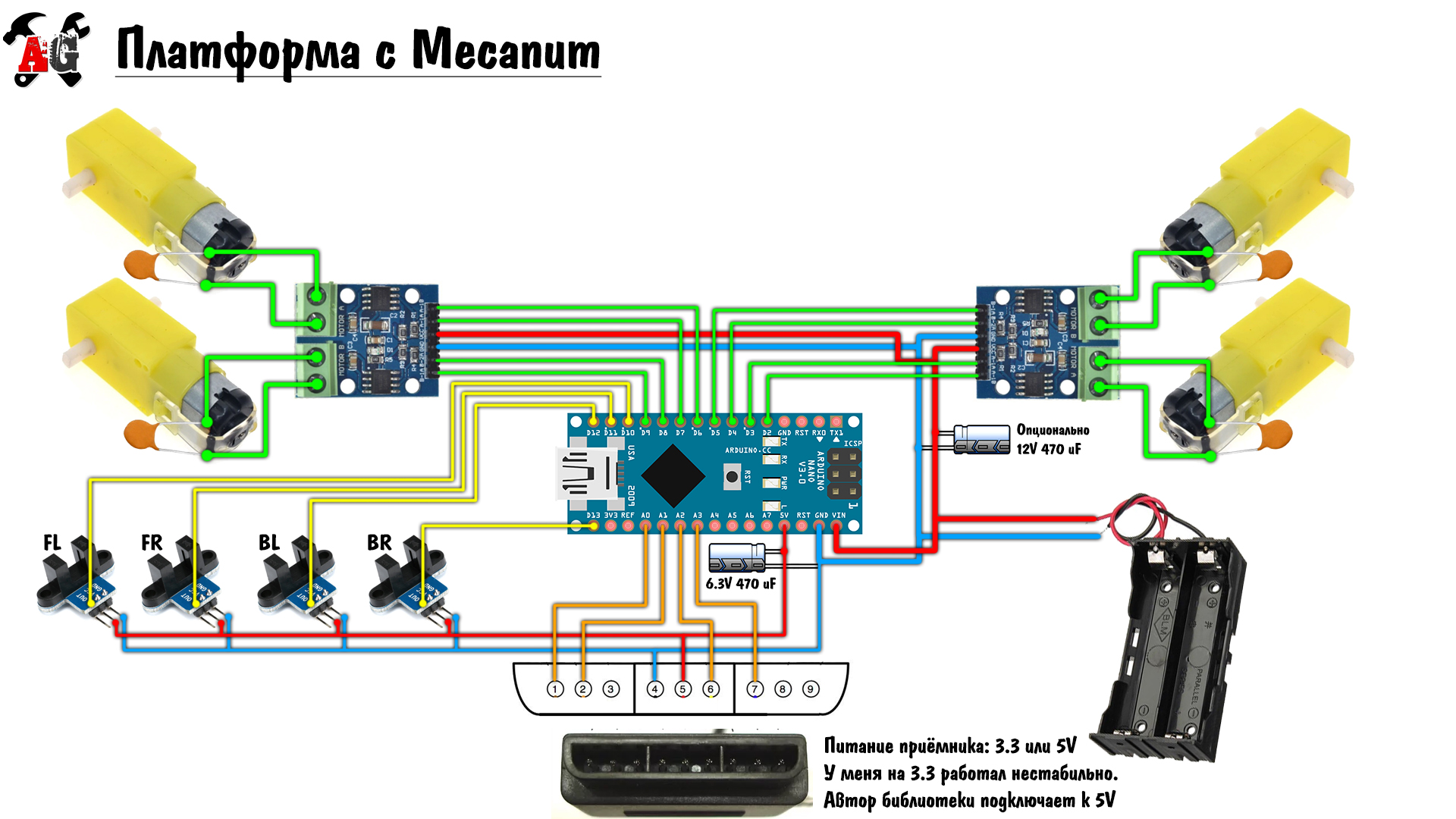
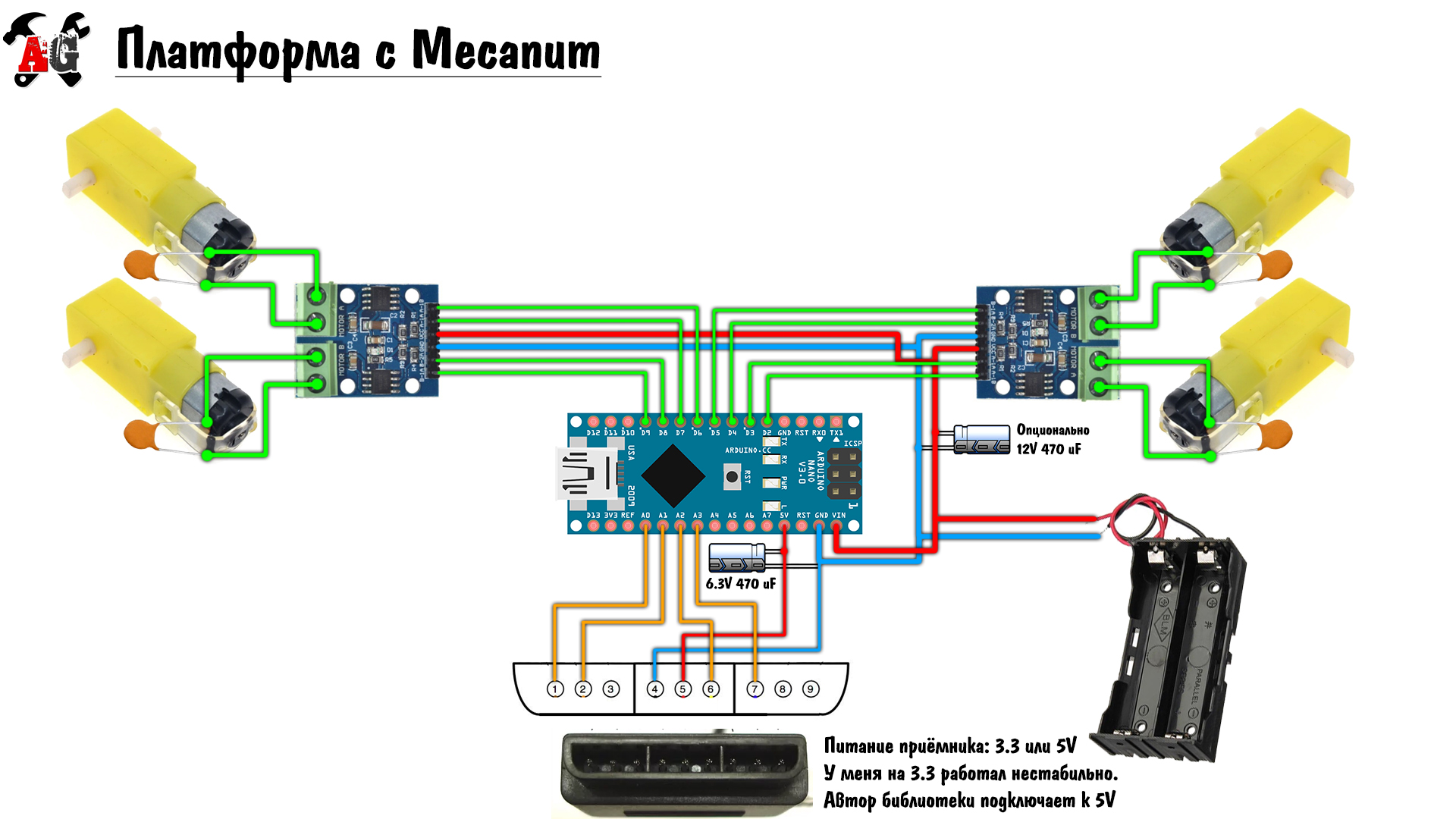
СХЕМЫ
ПРОШИВКА
Максимально подробный гайд по началу работы с платой и загрузке прошивки для проекта находится ЗДЕСЬ. Изучи его внимательно, прежде чем писать на форум или в группу ВК!
НАСТРОЙКИ
Настройки ПИД:
- P отвечает за резкость регулирования. При малых значениях сигнала вообще не будет, при слишком больших – будет трясти
- I отвечает за коррекцию ошибки в течение времени
- D отвечает за компенсацию резких изменений
ПОДДЕРЖАТЬ
Вы можете поддержать меня за создание доступных проектов с открытым исходным кодом, полный список реквизитов есть вот здесь.