
ОБНОВЛЕНИЯ
- v1.1 — улучшен алгоритм
- v1.2 — совместимость с esp
- v1.3 — небольшие улучшения и фиксы
ТЕОРИЯ
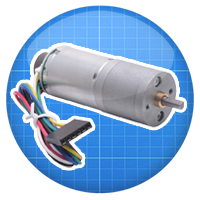
Решил я сделать библиотеку для управления обычным щёточным мотором с энкодером, которая позволила бы управлять им как шаговым (с либой AccelStepper) с поддержкой ускорения и ограничения максимальной скорости. Библиотека полностью наследует все инструменты по работе с мотором из GyverMotor. Основной метод библиотеки tick() принимает текущее положение вала мотора (сигнал с потенциометра или энкодера) и позволяет:
- Сделать полноценный сервопривод из моторчика с редуктором и резистором на валу
- Поддерживать скорость вращения моторчика под переменной нагрузкой (шпиндель станка)
- Из моторчика с энкодером позволяет получить аналог шагового мотора с возможностью повернуть вал на нужное количество оборотов (градусов) с плавным ускорением и ограничением максимальной скорости
БИБЛИОТЕКА
Библиотека для расширенного управления и стабилизации мотора с энкодером
- Наследует все фишки из библиотеки GyverMotor (поддержка разных драйверов и режимов)
- Режим поддержания скорости с обратной связью
- Режим поворота на заданный угол с обратной связью
- Настраиваемые коэффициенты PID регулятора
- Ограничение ускорения и скорости
- Библиотека принимает любой тип обратной связи: энкодер, потенциометр, и т.д.
- Поддержка мотор-редукторов, настройка передаточного отношения энкодера
- Регулятор учитывает “мёртвую зону” мотора
- Все функции работают в градусах и “тиках” энкодера
Поддерживаемые платформы: все Arduino (используются стандартные Wiring-функции)
УСТАНОВКА
- Библиотеку можно найти и установить через менеджер библиотек по названию AccelMotor в:
- Arduino IDE (Инструменты/Управлять библиотеками)
- Arduino IDE v2 (вкладка «Library Manager»)
- PlatformIO (PIO Home, вкладка «Libraries»)
- Про ручную установку читай здесь
ДОКУМЕНТАЦИЯ
// управляет мотором. Вызывать как можно чаще (внутри таймер с периодом dt) // принимает текущее положение вала мотора (по счёту энкодера) // возвращает true если мотор всё ещё движется к цели bool tick(long pos); // установка передаточного отношения редуктора и энкодера // пример: если редуктор 1:30 - передаём в функцию 30 // пример: если редуктор 1:30 и энкодер на 12 тиков - передаём 30*12 void setRatio(float ratio); // установка периода регулятора (рекомендуется 2-50 миллисекунд) void setDt(int dt); // установка и получение текущей позиции в тиках энкодера и градусах. // setCurrent(pos) равносильна вызову tick(pos) и в принципе не нужна! void setCurrent(long pos); long getCurrent(); long getCurrentDeg(); // установка и получение целевой позиции в тиках энкодера и градусах void setTarget(long pos); void setTargetDeg(long pos); long getTarget(); long getTargetDeg(); // установка максимальной скорости в тиках энкодера/секунду и градусах/секунду void setMaxSpeed(int speed); void setMaxSpeedDeg(int speed); // установка ускорения тиках энкодера и градусах в секунду void setAcceleration(float accel); void setAccelerationDeg(float accel); // установка и получение целевой скорости в тиках энкодера/секунду и градусах/секунду void setTargetSpeed(int speed); void setTargetSpeedDeg(int speed); int getTargetSpeed(); int getTargetSpeedDeg(); // получить текущую скорость в тиках энкодера/секунду и градусах/секунду int getSpeed(); int getSpeedDeg(); // получить текущий ШИМ сигнал (float из ПИД регулятора) float getDuty(); // ручная установка режима работы // IDLE_RUN - tick() не управляет мотором. Может использоваться для отладки // ACCEL_POS - tick() работает в режиме плавного следования к целевому углу // PID_POS - tick() работает в режиме резкого следования к целевому углу // ACCEL_SPEED - tick() работает в режиме плавного поддержания скорости (с заданным ускорением) // PID_SPEED - tick() работает в режиме поддержания скорости по ПИД регулятору void setRunMode(runMode mode); // возвращает true, если вал мотора заблокирован, а сигнал подаётся bool isBlocked(); // коэффициенты ПИД регулятора // пропорциональный - от него зависит агрессивность управления, нужно увеличивать kp // при увеличении нагрузки на вал, чтобы регулятор подавал больший управляющий ШИМ сигнал float kp = 2.0;// (знач. по умолчанию) // интегральный - позволяет нивелировать ошибку со временем, имеет накопительный эффект float ki = 0.9;// (знач. по умолчанию) // дифференциальный. Позволяет чуть сгладить рывки, но при большом значении // сам становится причиной рывков и раскачки системы! float kd = 0.1;// (знач. по умолчанию) // установить зону остановки мотора для режима стабилизации позиции (по умолч. 8) void setStopZone(int zone);
ПРИМЕРЫ
Остальные примеры смотри в папке examples библиотеки, также примеры можно открыть из Arduino IDE/Файл/Примеры
/*
Пример управления мотором при помощи драйвера полного моста и потенциометра
Для режимов следования к позиции и удержания скорости
*/
#include "AccelMotor.h"
AccelMotor motor(DRIVER2WIRE, 2, 3, HIGH);
// инициализация наследуется от GyverMotor
// варианты инициализации в зависимости от типа драйвера:
// AccelMotor motor(DRIVER2WIRE, dig_pin, PWM_pin, level)
// AccelMotor motor(DRIVER3WIRE, dig_pin_A, dig_pin_B, PWM_pin, level)
// AccelMotor motor(RELAY2WIRE, dig_pin_A, dig_pin_B, level)
/*
DRIVER2WIRE - двухпроводной драйвер (направление + ШИМ)
DRIVER3WIRE - трёхпроводной драйвер (два пина направления + ШИМ)
RELAY2WIRE - реле в качестве драйвера (два пина направления)
dig_pin, dig_pin_A, dig_pin_B - любой цифровой пин МК
PWM_pin - любой ШИМ пин МК
level - LOW / HIGH - уровень драйвера. Если при увеличении скорости мотор наоборот тормозит - смени уровень
*/
void setup() {
Serial.begin(9600);
// использую мотор JGA25
// редуктор 1:21.3
// энкодер 12 тиков на оборот
motor.setRatio(21.3 * 12);
// период интегрирования (по умолч. 20)
motor.setDt(30); // миллисекунды
// установка максимальной скорости для режима ACCEL_POS
motor.setMaxSpeedDeg(600); // в градусах/сек
//motor.setMaxSpeed(400); // в тиках/сек
// установка ускорения для режима ACCEL_POS
motor.setAccelerationDeg(10); // в градусах/сек/сек
//motor.setAcceleration(10); // в тиках
// минимальный (по модулю) ШИМ сигнал (при котором мотор трогается)
motor.setMinDuty(50);
// коэффициенты ПИД регулятора
motor.kp = 3; // отвечает за резкость регулирования.
// При малых значениях сигнала вообще не будет, при слишком больших – будет трясти
motor.ki = 0.2; // отвечает за коррекцию ошибки в течение времени
motor.kd = 0.1; // отвечает за компенсацию резких изменений
// установить зону остановки мотора для режима стабилизации позиции в тиках (по умолч. 8)
motor.setStopZone(10);
motor.setRunMode(ACCEL_POS);
// IDLE_RUN - tick() не управляет мотором. Может использоваться для отладки
// ACCEL_POS - tick() работает в режиме плавного следования к целевому углу
// PID_POS - tick() работает в режиме резкого следования к целевому углу
// ACCEL_SPEED - tick() работает в режиме плавного поддержания скорости (с заданным ускорением)
// PID_SPEED - tick() работает в режиме поддержания скорости по ПИД регулятору
}
void loop() {
// потенциометр на А0
// преобразуем значение в -255.. 255
static float val;
val += (255 - analogRead(0) / 2 - val) * 0.3; // фильтор
// для режима PID_SPEED/ACCEL_SPEED
//motor.setTargetSpeedDeg(val*3); // задаём целевую скорость в градусах/сек
// для режима PID_POS/ACCEL_POS
motor.setTargetDeg(val * 2); // задаём новый целевой угол в градусах
// обязательная функция. Делает все вычисления
// принимает текущее значение с энкодера или потенциометра
motor.tick(encTick(4));
static uint32_t tmr = 0;
if (millis() - tmr > 100) { // таймер на 100мс для графиков
tmr += 100;
// отладка позиции (открой плоттер)
Serial.print(motor.getTargetDeg());
Serial.print(',');
Serial.print(motor.getDuty());
Serial.print(',');
Serial.println(motor.getCurrentDeg());
/*
// отладка скорости (открой плоттер)
Serial.print(motor.getTargetSpeedDeg());
Serial.print(',');
Serial.print(motor.getDuty());
Serial.print(',');
Serial.println(motor.getSpeedDeg());
*/
}
}
// читаем энкодер вручную, через digitalRead()
long encTick(byte pin) {
static bool lastState;
static long encCounter = 0;
bool curState = digitalRead(pin); // опрос
if (lastState != curState) { // словили изменение
lastState = curState;
if (curState) { // по фронту
encCounter += motor.getState(); // запомнили поворот
}
}
return encCounter;
}
/*
Пример опроса энкодера через digitalRead
*/
#include "AccelMotor.h"
AccelMotor motor(DRIVER2WIRE, 2, 3, HIGH);
// подробнее об инициализации смотри в примере motor_demo
void setup() {
Serial.begin(9600);
motor.setRunMode(ACCEL_POS);
}
void loop() {
// потенциометр на А0
// преобразуем значение в -255.. 255
static float val;
val += (255 - analogRead(0) / 2 - val) * 0.3; // фильтор
// для режима PID_SPEED/ACCEL_SPEED
//motor.setTargetSpeedDeg(val*3); // задаём целевую скорость в градусах/сек
// для режима PID_POS/ACCEL_POS
motor.setTargetDeg(val * 2); // задаём новый целевой угол в градусах
// обязательная функция. Делает все вычисления
// принимает текущее значение с энкодера или потенциометра
motor.tick(encTick(4));
}
// функция опроса энкодера через digitalRead()
long encTick(byte pin) {
static bool lastState;
static long encCounter = 0;
bool curState = digitalRead(pin); // опрос
if (lastState != curState) { // словили изменение
lastState = curState;
if (curState) { // по фронту
encCounter += motor.getState(); // запомнили поворот
// motor.getState() вернёт 1 или -1 в зависимости от направления
}
}
return encCounter;
}
/*
Пример опроса энкодера через аппаратные прерывания
*/
#include "AccelMotor.h"
AccelMotor motor(DRIVER2WIRE, 4, 3, HIGH);
// подробнее об инициализации смотри в примере motor_demo
void setup() {
Serial.begin(9600);
motor.setRunMode(ACCEL_POS);
attachInterrupt(0, isr, RISING);
}
volatile long encCounter = 0;
void isr() {
// опрос энкодера
encCounter += motor.getState();
}
void loop() {
// потенциометр на А0
// преобразуем значение в -255.. 255
static float val;
val += (255 - analogRead(0) / 2 - val) * 0.3; // фильтор
// для режима PID_SPEED/ACCEL_SPEED
//motor.setTargetSpeedDeg(val*3); // задаём целевую скорость в градусах/сек
// для режима PID_POS/ACCEL_POS
motor.setTargetDeg(val * 2); // задаём новый целевой угол в градусах
// обязательная функция. Делает все вычисления
// принимает текущее значение с энкодера или потенциометра
motor.tick(encCounter);
}
ПОДДЕРЖАТЬ
Вы можете поддержать меня за создание доступных проектов с открытым исходным кодом, полный список реквизитов есть вот здесь.

![Работа по таймеру в Arduino. GyverTimer [12.11.19]](https://alexgyver.ru/wp-content/uploads/2021/06/gyvertimer.jpg)