Стараюсь оставлять ссылки только на проверенные крупные магазины, из которых заказываю сам. Также по первые ссылки ведут по возможности на минимальное количество магазинов, чтобы минимально платить за доставку. Если какие-то ссылки не работают, можно поискать аналогичную железку в каталоге Ардуино модулей. Также проект можно попробовать собрать из компонентов моего набора GyverKIT.
Arduino Nano ATMega328: купить в РФ, aliexpress, aliexpress, искать
- Барометр https://ali.ski/okvDh7 https://ali.ski/fXE81w
Сервопривод: aliexpress, aliexpress, искать
Корпус 100x60x25: aliexpress, aliexpress, искать
Аккумуляторы 18650, зарядники, бат. отсеки, индикация: перейти
- Держатель для 3хАА https://ali.ski/i4_SF9
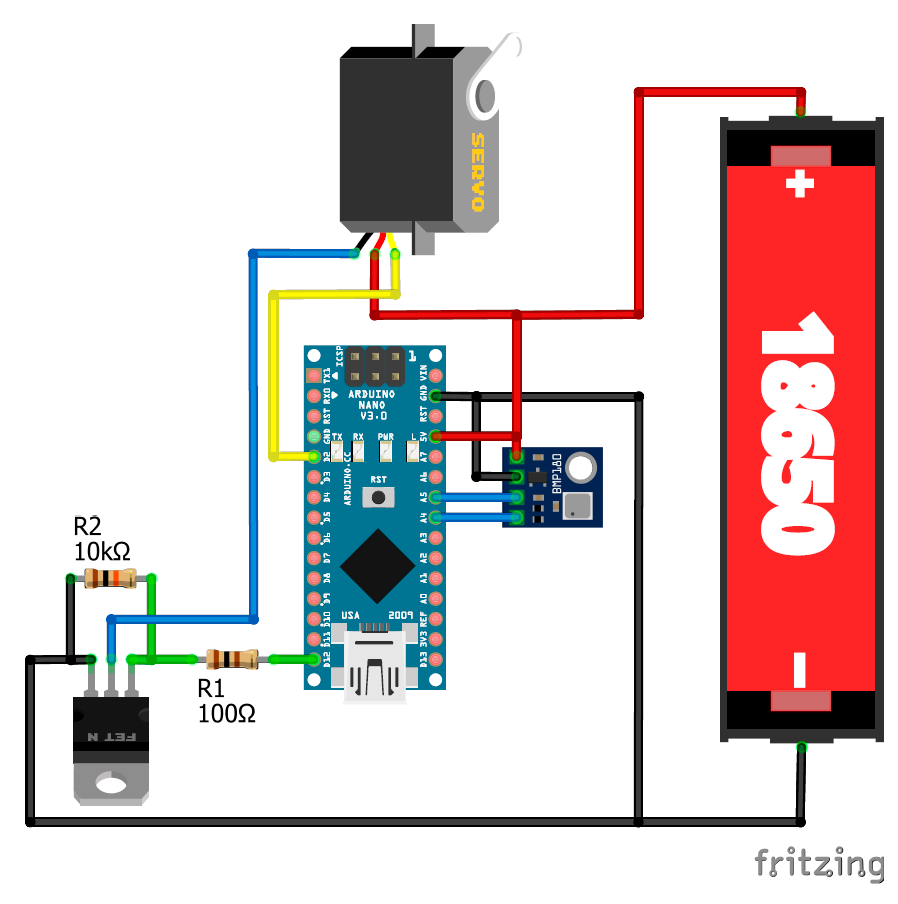
- Мосфеты: IRF3704ZPBF, IRLB8743PBF, IRL2203NPBF, IRLB8748PBF, IRL8113PBF, IRL3803PBF, IRLB3813PBF, IRL3502PBF, IRL2505PBF, IRF3711PBF, IRL3713PBF, IRF3709ZPBF, AUIRL3705N, IRLB3034PBF, IRF3711ZPBF
- Мосфет модуль https://ali.ski/H5xAS
- Резисторы 100 Ом, 10 кОм