
Электромагнитное реле #
Разобрано в отдельном уроке про реле.
Оптопара #
Оптопара выполняет две функции: коммутирует нагрузку, пусть и небольшую, и развязывает её от МК. Оптопары можно использовать для имитации нажатия кнопок у других внешних устройств, то есть замыкать чисто логический сигнал. Также можно использовать для разрывания питания различных датчиков и модулей в устройстве вместо транзистора.
Оптопара состоит из двух частей: светодиод, который мы включаем при помощи МК, и выходная часть, которая может быть разной (транзистор, симистор и проч.), таким образом сигнал с МК отделяется от нагрузки через луч света, что очень важно при коммутации высоковольтных или каких-то чувствительных цепей.
Для управления внешними устройствами надо брать оптопары с транзисторным выходом, например распространённую PC814 и её аналоги (FOD814, LTV814), при желании можно выковырять почти из любого блока питания. Данная оптопара позволяет коммутировать нагрузку с напряжением до 60 Вольт и током до 50 мА. Покажу вырезку из даташита с этими параметрами, у остальных оптопар параметры будут называться точно так же:
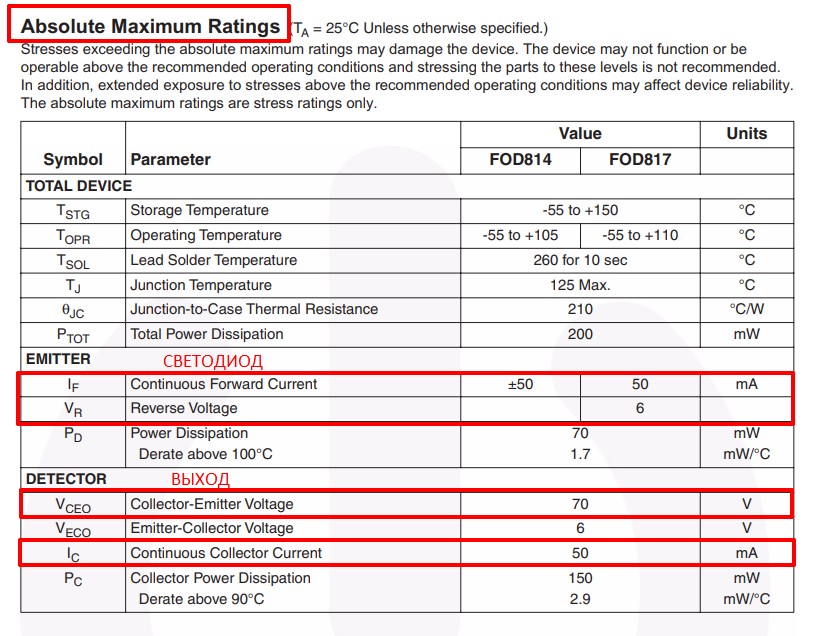
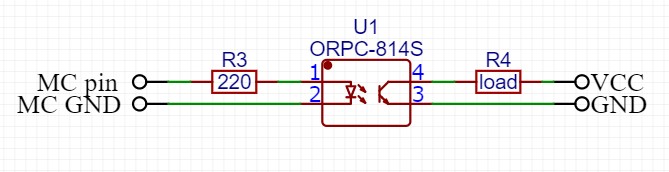
Подключается оптопара следующим способом: светодиодом мы управляем с МК через резистор, а выход подключаем в разрыв нагрузки, соблюдая полярность. Что касается светодиода на управляющем входе оптопары - для него нужен резистор, как считать резистор для светодиода было рассказано в уроке про светодиоды. В большинстве случаев достаточно поставить резистор на 220 Ом, как и для любых светодиодов. Если ток светодиода будет меньше указанного, соответственно уменьшится максимальный ток выхода, что для этой оптопары уже критично (светодиод хочет аж 50 мА). Оптопара не предусмотрена для управления большой нагрузкой, обычно это коммутация других логических цепей, поэтому о токе можно не думать.
Подключение нагрузки (условный нагрузочный резистор):

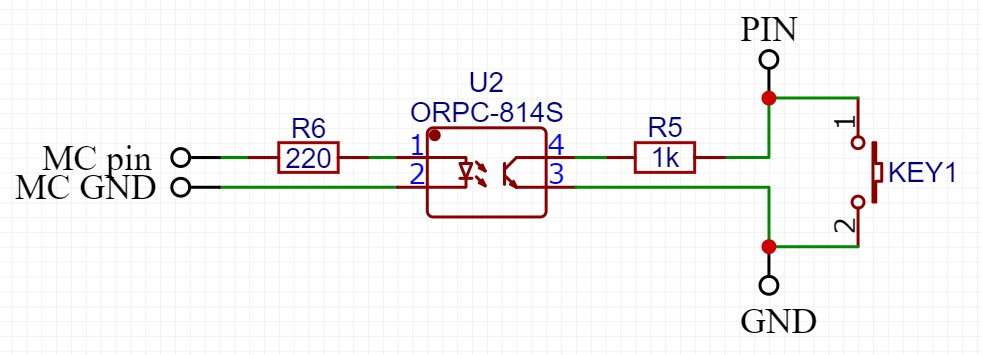
Для управления "кнопкой" другого устройства (фотоаппарат, кофемашина) достаточно подключить оптопару параллельно кнопке. Во избежание замыкания оптопары на кнопку, что сожгёт оптопару, желательно поставить защитный резистор с номиналом 200-1000 Ом. Тут будет две схемы, по сути одинаковые. Перед подключением нужно проверить мультиметром, где у кнопки "плюс", а где "минус", так как выход с оптопары у нас полярный:

Существует также интересная оптопара TLP172 с мосфетным выходом, причём неполярным - может коммутировать нагрузку в любую сторону! Управляет напряжением до 60 Вольт при токе до 400 мА - уже вполне серьёзная игрушка.
MOSFET-транзистор #
Разобран в отдельном уроке про MOSFET
MOSFET модуль переехал в отдельный урок
Твердотельное реле (SSR DC) #
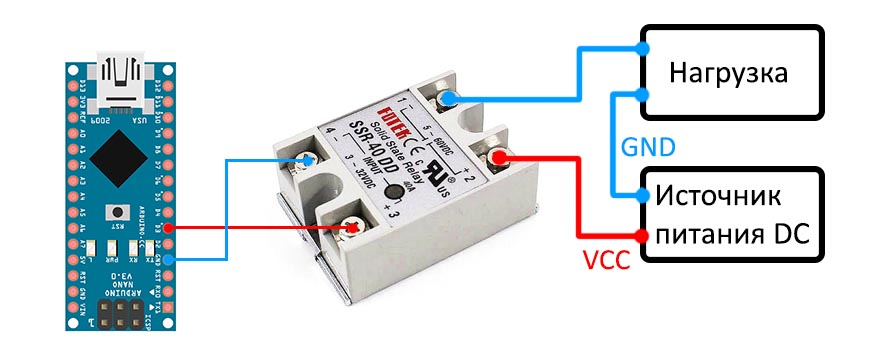
Более простой вариант - твердотельное реле (Solid State Relay, SSR) для постоянного тока - DC, найти можно на том же Aliexpress по запросу SSR DC. Внимательно смотрим на маркировку: под выходными клеммами должно быть написано VDC, т.е. постоянное напряжение. Твердотельное реле имеет стандартный корпус для моделей постоянного и переменного тока, поэтому нужно читать что написано и не перепутать. Также в маркировке после слова SSR обычно указан ток в Амперах, т.е. SSR-25 это реле на 25 Ампер. Максимальное напряжение указано под выходными клеммами.

Твердотельное реле подключается напрямую к Arduino, пин - к GND, + к любому цифровому пину. Выход реле ставится в разрыв цепи питания нагрузки, как выключатель. Важно не перепутать плюс и минус, потому что внутри реле представляет собой полевой транзистор на радиаторе:
Защита от помех #
Раздельное питание #
Один из лучших способов защититься от помех по питанию - питать силовую и логическую части от отдельных источников питания: хороший малошумящий источник питания на микроконтроллер и модули/сенсоры, и отдельный на силовую часть. В автономных устройствах иногда ставят отдельный аккумулятор на питание логики и отдельный мощный - на силовую часть, потому что стабильность и надёжность работы очень важна.
Искрогасящие цепи #
При размыкании контактов в цепи питания индуктивной нагрузки происходит так называемый индуктивный выброс, который резко подбрасывает напряжение в цепи вплоть до того, что между контактами реле или выключателя может проскочить электрическая дуга (искра). В дуге нет ничего хорошего - она выжигает частички металла контактов, из-за чего они изнашиваются и со временем приходят в негодность. Также такой скачок в цепи провоцирует электромагнитный выброс, который может навести в электронном устройстве сильные помехи и привести к сбоям или даже поломке! Самое опасное, что индуктивной нагрузкой может являться сам провод: вы наверняка видели, как искрит обычный выключатель света в комнате. Лампочка - не индуктивная нагрузка, но идущий к ней провод имеет индуктивность.
Для защиты от выбросов ЭДС самоиндукции в цепи постоянного тока используют обыкновенный диод, установленный встречно-параллельно нагрузке и максимально близко к ней. Диод просто закоротит на себя выброс:
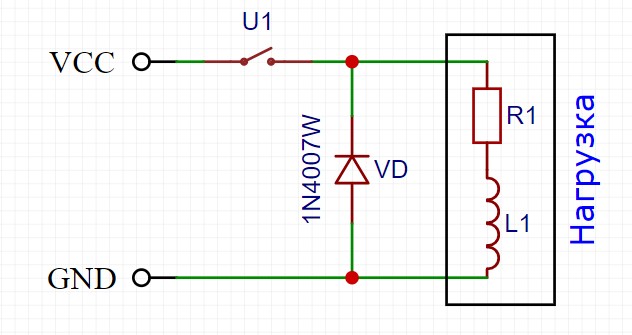
Где VD - защитный диод, U1 - выключатель (транзистор, реле), а R и L схематично олицетворяют индуктивную нагрузку. Диод нужно ОБЯЗАТЕЛЬНО ставить при управлении индуктивной нагрузкой (электромотор, соленоид, клапан, электромагнит, катушка реле) при помощи транзистора, то есть вот так:
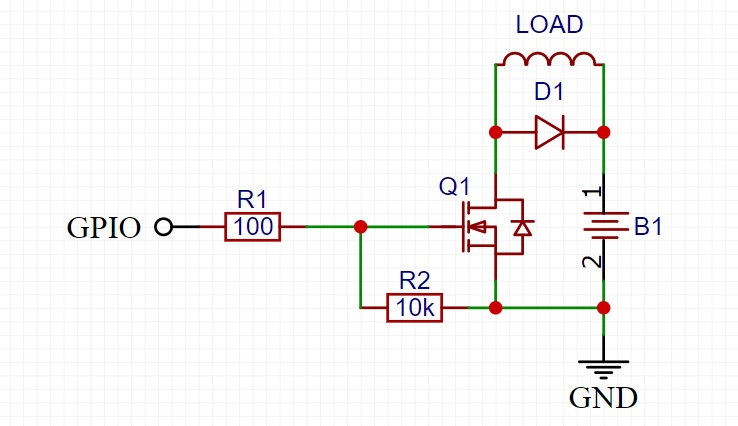
При управлении ШИМ сигналом рекомендуется ставить быстродействующие диоды (например серии 1N49xx) или диоды Шоттки (например серии 1N58xx), максимальный ток диода должен быть больше или равен максимальному току нагрузки.
Фильтры #
Если силовая часть питается от одного источника с МК, то помехи по питанию неизбежны. Простейший способ защитить МК от таких помех - конденсаторы по питанию как можно ближе к МК: электролит 6.3V 470 uF (мкФ) и керамический на 0.1-1 мкФ, они сгладят короткие просадки напряжения. Электролит с низким ESR справится с такой задачей максимально качественно.

Ещё лучше с фильтрацией помех справится LC фильтр, состоящий из индуктивности и конденсатора. Индуктивность нужно брать с номиналом в районе 100-300 мкГн и с током насыщения больше, чем ток нагрузки после фильтра. Конденсатор - электролит с ёмкостью 100-1000 uF в зависимости опять же от тока потребления нагрузки после фильтра. Подключается вот так, чем ближе к нагрузке - тем лучше:
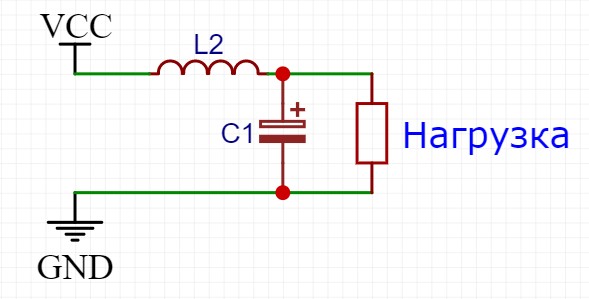
Подробнее о расчёте фильтров можно почитать здесь.
Полезные страницы #
- Набор GyverKIT – наш большой стартовый набор Arduino, продаётся в России
- Каталог ссылок на дешёвые Ардуины, датчики, модули и прочие железки с AliExpress
- Обратная связь – сообщить об ошибке в уроке или предложить дополнение по тексту (alex@alexgyver.ru)
- Поддержать автора за работу над уроками