
ESP8266 - дешёвый китайский микроконтроллер с WiFi на борту. Популярные платы и модули на его основе:
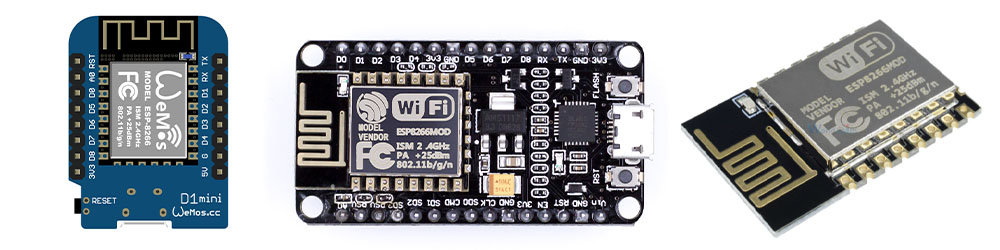
Слева направо: Wemos D1 mini, NodeMCU, ESP-12
Обратите внимание: ESP8266 - это именно сам МК, микросхема. На платах часто можно встретить модуль ESP-12, который содержит ESP8266, антенну и флеш-память - у ESP8266 нет своей флешки:
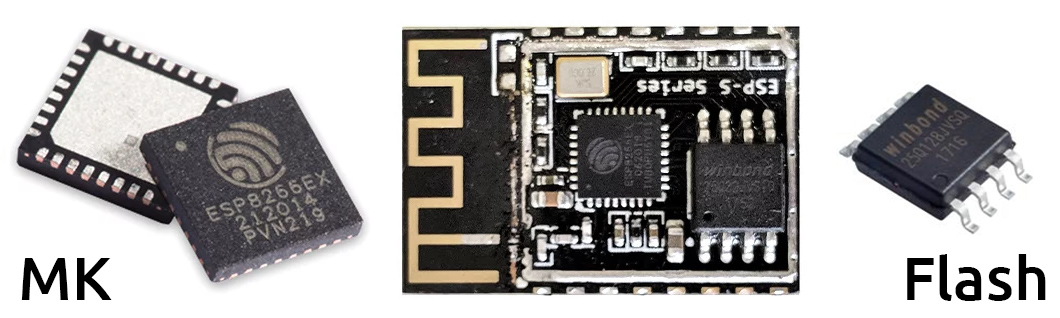
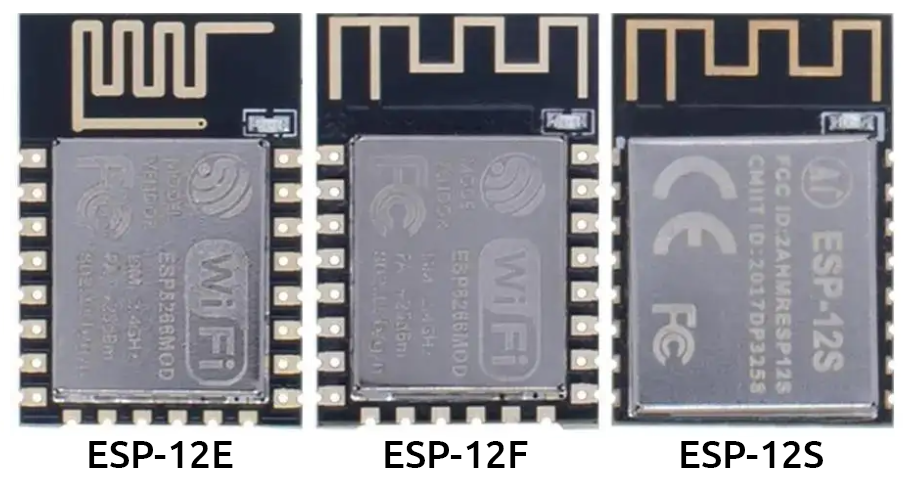
Под капотом у ESP-12S
Информация #
На сайте есть уроки ESP8266/ESP32 и документация на некоторые их инструменты
Документация на Arduino ядро:
- GitHub
- ReadTheDocs
- Частично на русском у меня сайте
Характеристики #
| Характеристика | Значение |
|---|---|
| Микроконтроллер | Espressif ESP8266 |
| Логический уровень | 3.3V |
| Напряжение питания | 2.2.. 3.6V |
| Через стабилизатор | Wemos: 4.5.. 5.5V, NodeMCU: 5.. 15V |
| Макс. ток с пина | 12 mA |
| Ток потребления | 300 mA при запуске и передаче данных, 35 mA во время работы, 80 mA в режиме точки доступа |
| Режимы энергосбережения | Modem sleep (15 mA), Light sleep (0.4 mA), Deep sleep (15 uA) |
| Частота тактирования | 80/160 MHz |
| RAM | 82 kB (доступно около 52 kB) |
| Flash | Нет. Внешняя 1.. 16 MB |
| EEPROM | Нет. Эмуляция из Flash |
| GPIO | 17 (доступно 11, из которых 6 не имеют ограничений) |
| ADC | 1 канал, до 1.0V, 10 bit |
| ШИМ | Нет. Программный на любом пине |
| Аппаратные интерфейсы | 1x SPI, 1x I2S, 1.5x UART, WiFi |
- Аппаратного I2C нет, используется программная реализация на любых пинах. По умолчанию в среде Arduino для этого используются GPIO 4 и 5
- От второго UART доступен только TX. Первый UART можно переназначить на другие пины, что во многих сценариях работает как ещё один UART
Платы и распиновка #
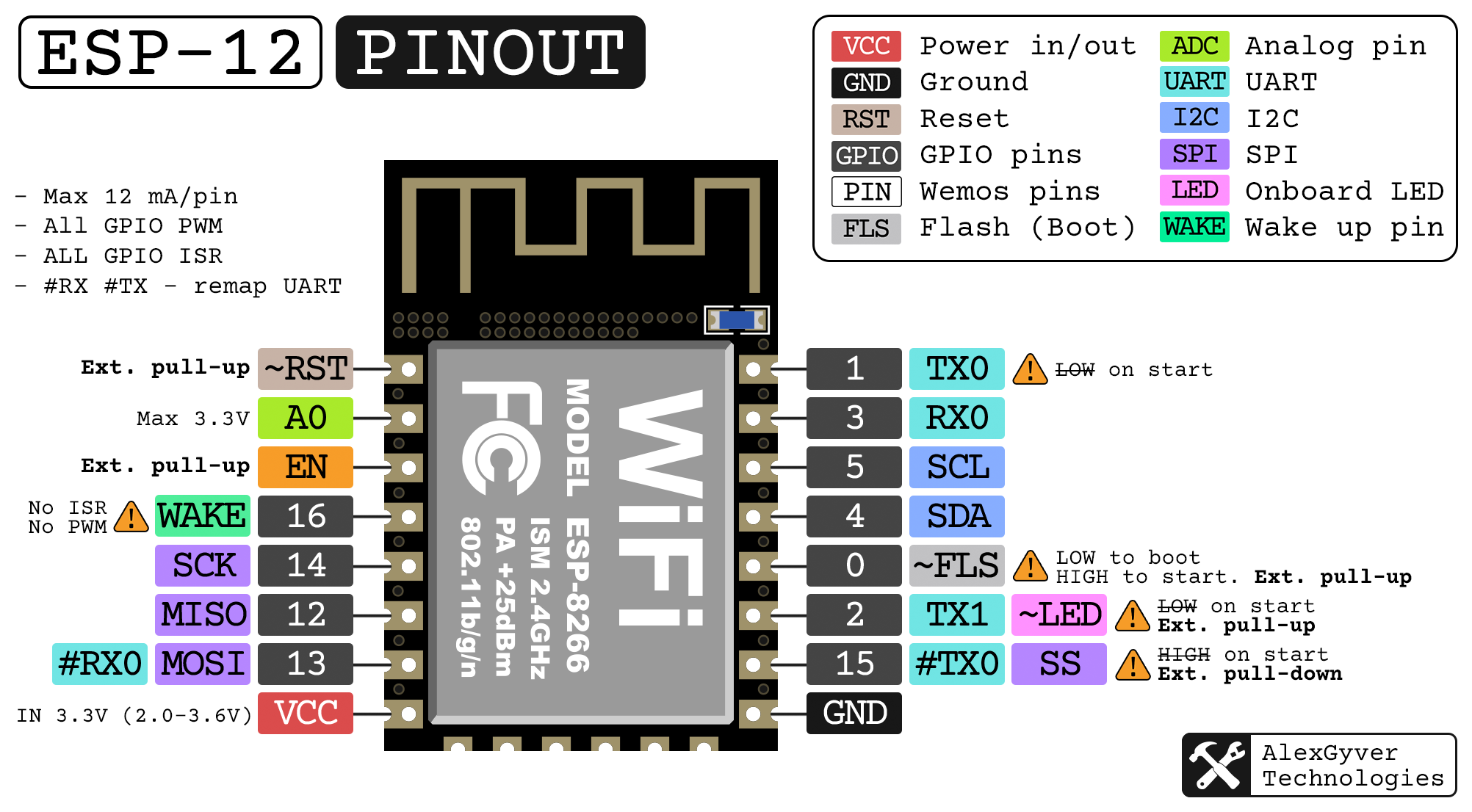
ESP-12 #
"Голый" модуль esp8266, подходит для установки на плату. Выведены все пины:
Для работы нужна минимальная обвязка (включая делитель на АЦП для чтения 0.. VCC и сброс через USB-TTL):
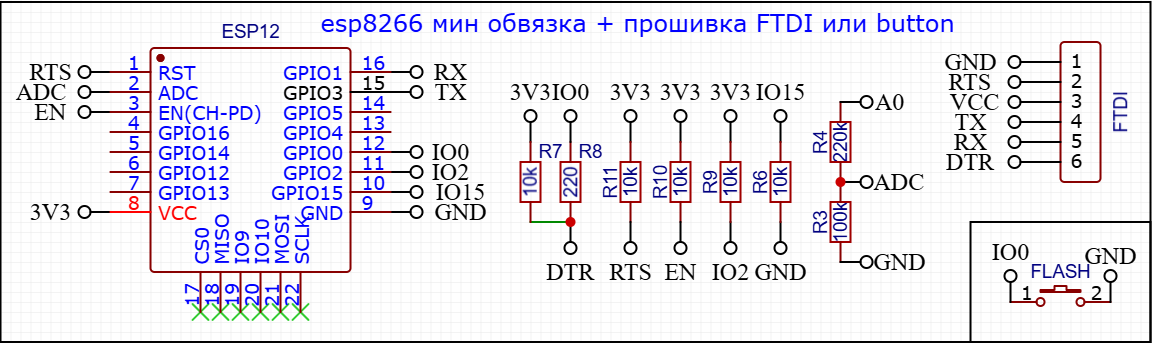
| Пин | Подтяжка 10k |
|---|---|
| IO0 | VCC |
| RST | VCC |
| EN | VCC |
| IO2 | VCC |
| IO15 | GND |
Версии ESP-12 #
- ESP-12 - первая версия с не самой удачной разводкой. Сейчас почти не встречается, к использованию не рекомендуется
- ESP-12E - выведены дополнительные пины МК
- ESP-12F - улучшена антенна. Распиновка и футпринт как у ESP-12E
- ESP-12S - антенна стала ещё лучше. Убраны пины, отвечающие за флешку (нижняя линия пинов) - на практике они и не используются. С этой версией удобнее всего разводить плату - лучше подходит для проектов
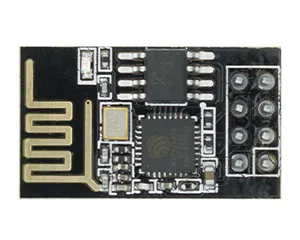
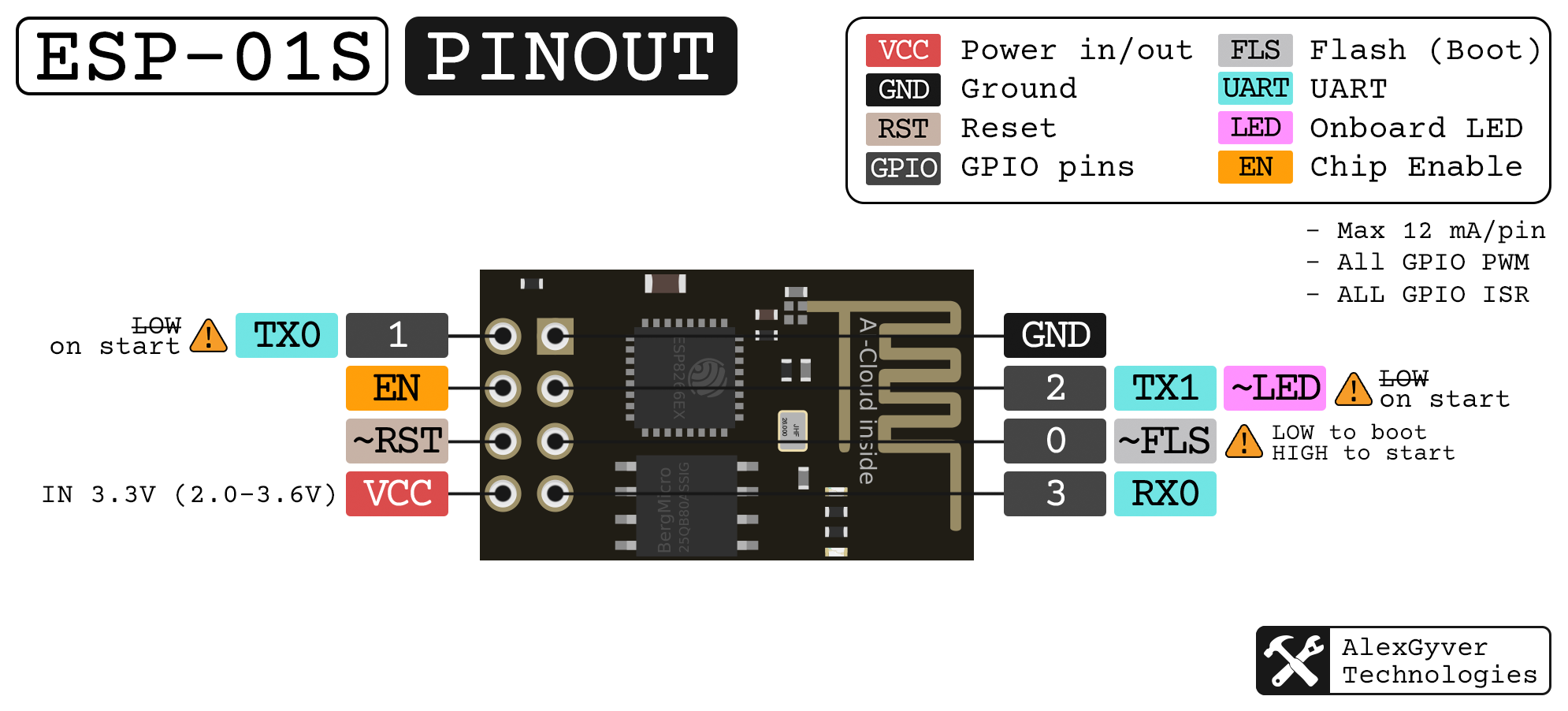
ESP-01 #
Минимальный модуль, выведен минимум пинов. Подходит для работы в качестве "модема" для другого МК, для использования в совсем простых проектах и для установки в специальный модуль реле:
| В наборе GyverKIT | Aliexpress | |
|---|---|---|
 |
IOT |
Купить |
 |
IOT |
Купить |
 |
IOT |
Купить |
Для прошивки можно использовать специальный "прошиватор" - плата с USB и колодкой для установки модуля. Для комфортной работы плату нужно доработать - добавить кнопку между пинами:
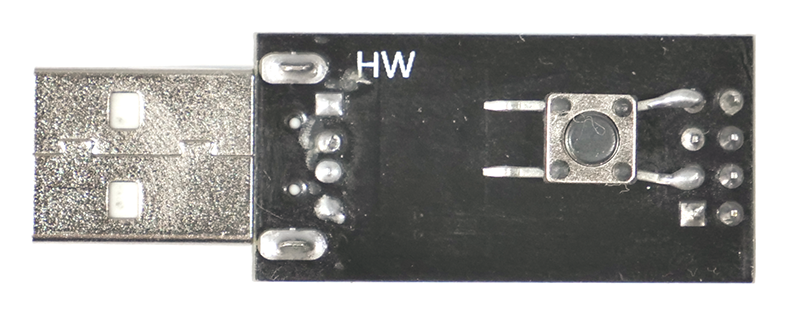
ESP-01 вставляется антенной к USB штекеру:
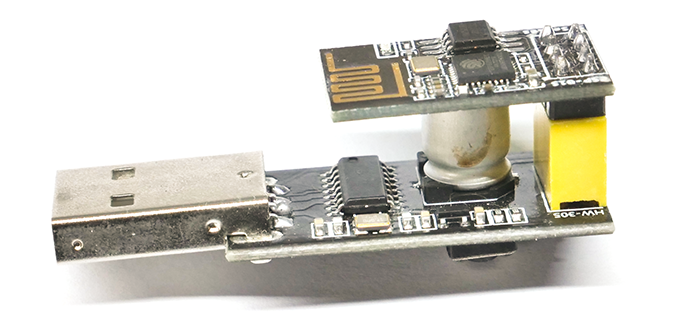
Для перевода в режим прошивки питание на ESP должно быть подано после нажатия кнопки на плате, то есть:
- Вставить ESP-01 в плату
- Зажать кнопку
- Вставить плату в USB
- Отпустить кнопку
- Загрузить прошивку
- Перезагрузить ESP (вытащить-вставить без нажатия кнопки)
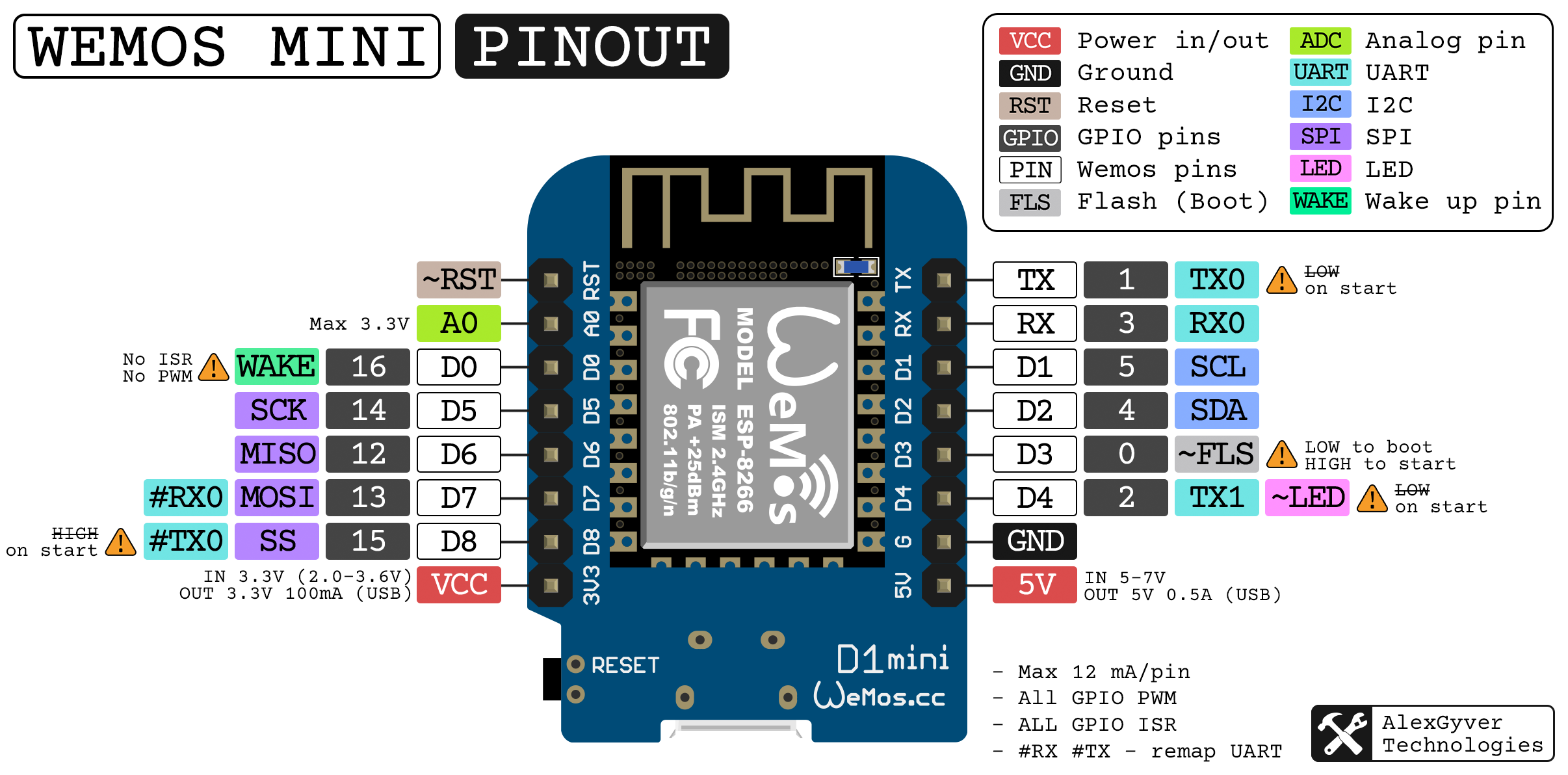
Wemos mini #
Плата Wemos D1 mini является лучшим вариантом для знакомства с МК ESP8266 - недорогая, компактная и удобная в работе на макетке:
| В наборе GyverKIT | Aliexpress | |
|---|---|---|
 |
START IOT EXTRA |
Купить |
Существует несколько вариантов исполнения и их версий, в принципе они все хорошие и рекомендуются к покупке:
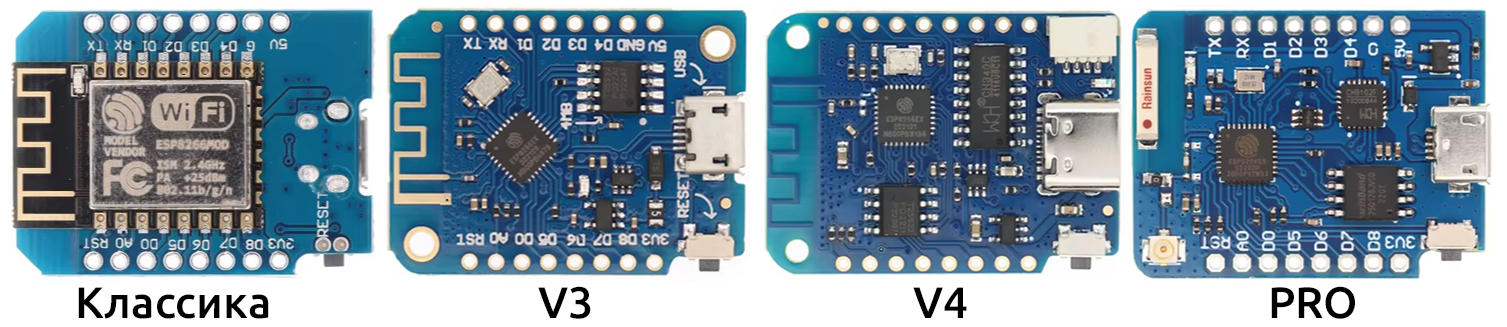
Будьте внимательнее с V4 - у него пины подписаны с обратной стороны, поэтому если вставить в макетку подписями кверху - получится зеркальное расположение пинов по сравнению с тем, как показано с обычным вемосом на схемах в уроках
Особенности пинов #
У esp8266 много системных пинов, с которыми нужно быть очень внимательным:
- К нескольким пинам подключена внешняя Flash память, в общем случае их использовать нельзя (если очень нужно - ищите информацию). На плате NodeMCU визуально гораздо больше пинов, чем на Wemos Mini, но по факту "безопасных" для использования пинов там ровно столько же - у Wemos системные пины не выведены на плату
- Светодиод
LED_BUILTINнаходится на пинеGPIO2и его поведение инвертировано: при подачеLOWон включается и наоборот - На
GPIO16нельзя подключать прерыванияattachInterrupt()и включать ШИМ сигналanalogWrite() GPIO0управляет режимом запуска МК (старт или режим прошивки), поэтому нельзя подключать к нему устройства, которые могут замкнуть пин на VCC/GND до старта- При старте контроллера почти все пины делают скачок до высокого уровня, подробнее - в этой статье. Единственными "спокойными" пинами являются
D1(GPIO5) иD2(GPIO4). Если контроллер управляет напрямую какими-то железками (реле, транзистор, или является "кнопкой" для другого устройства), то лучше использовать именно эти пины! На этих же пинах сидит I2C, но шину можно переназначить на любые другие пины - С оставшимися пинами тоже не всё гладко: некоторые из них требуют наличия определенного логического уровня на момент включения МК (подача питания, перезагрузка). Если к этим пинам подключить что-то, дающее противоположный сигнал - esp не запустится. На распиновке у таких пинов указан и зачёркнут сигнал, который нельзя подавать при запуске:
| Пин | Нельзя |
|---|---|
| D8 (GPIO15) | HIGH |
| D4 (GPIO2) | LOW |
| TX (GPIO1) | LOW |
К этим пинам можно подключать внешние железки, но с пониманием того, какой сигнал они дадут на пин. Например, можно подключить энкодер, он прижмёт системный пин к GND и esp не запустится
Нумерация пинов #
У самого чипа esp8266 все выводы пронумерованы цифрами, на распиновке они подписаны как GPIOn, где n - номер GPIO. На Wemos V4 на плате указаны номера GPIO. На NodeMCU и классическом Wemos Mini пины подписаны как Dn и эти номера не совпадают с номерами GPIO! Можно использовать как нумерацию выводов GPIO - digitalWrite(5, LOW), так и D-нумерацию пинов на плате - digitalWrite(D1, LOW), если выбрана плата Wemos. Новички очень часто в этом путаются, будьте внимательны. Также GPIO1 и GPIO3 подписаны на плате как TX и RX, по этим названиям к ним тоже можно обращаться - digitalWrite(TX, LOW).
| Dn | GPIO |
|---|---|
D0 |
16 |
D1 |
5 |
D2 |
4 |
D3 |
0 |
D4 |
2 |
D5 |
14 |
D6 |
12 |
D7 |
13 |
D8 |
15 |
RX |
3 |
TX |
1 |
Аналоговый пин один, к нему можно обращаться как analogRead(0).
Начало работы #
Читай урок про начало работы с Arduino
Arduino IDE #
- Ссылка для менеджера плат:
https://arduino.esp8266.com/stable/package_esp8266com_index.json - Установить
esp8266 by ESP8266 Community - Для платы Wemos mini выбираем
LOLIN(WEMOS) D1 R2 & mini - Для работы с любой платой (даже самодельной) можно выбрать
Generic esp8266, будет доступен полный набор настроек
Параметры в меню платы:
- Upload speed: скорость загрузки прошивки. Можно смело поднимать до 921600
- CPU Frequency: частота тактирования процессора. Для большинства задач хватит стандартных 80 МГц. На 160 МГц будет работать шустрее, но могут быть сбои
- Flash Size: распределение памяти, настройка имеет вид xMB (FS:xMB OTA:~xKB). Размер памяти под программу не меняется - это всегда 1 МБ
- Первое число: полный объём микросхемы памяти (в основном 4MB, на Wemos и NodeMCU стоят такие)
- Второе число: объём под файловое хранилище
- Третье число: объём под OTA (обновление по воздуху) - всегда меньше 1 МБ
- Что выбрать? У Wemos самый ходовой - первый вариант: 4MB (FS:2MB OTA:~1019KB)
- Flash mode: режим загрузки во Flash память
- DOUT: медленный, но совместим со всеми модификациями esp8266
- QIO: более быстрый, но будет работать не на всех чипах
- Erase Flash: режим очистки памяти
- Only Sketch: стереть только программу
- Sketch + WiFi Settings: стереть программу и настройки WiFi (логин-пароль последнего подключения и т.д.)
- All Flash Contents: полностью очистить память
platformio.ini #
Конфиг для PlatformIO под Wemos mini:
[env:d1_mini]
platform = espressif8266
board = d1_mini
framework = arduino
monitor_speed = 115200
upload_speed = 921600
monitor_filters = esp8266_exception_decoder, default
build_type = debug
board_build.filesystem = littlefs
lib_deps =Особенности #
Отличия по Arduino-фреймворку см. в этом уроке.
Проблема загрузки #
На некоторые китайские платы (они все китайские, как и МК) иногда не получается загрузить прошивку - один раз может загрузиться, а следующие несколько раз выдать ошибку. В этом случае иногда помогает ручной перезапуск МК перед процессом загрузки (удерживать кнопку Reset), либо переподключение платы к ПК.
Проблемы могут возникнуть при плохом питании:
- Слабый USB порт при подключении по USB
- Некачественный или повреждённый USB кабель, штекер или гнездо
- Слабый стабилизатор при разработке своей платы - МК может импульсно потреблять до 400 мА
WiFi #
WiFi реализован синхронно, его обработчик должен постоянно вызываться во время работы программы не реже, чем каждые 20 мс (если WiFi используется в программе). Обработка WiFi происходит в следующих местах:
- После выхода из
loop() - Внутри
delay() - Внутри
yield()
Поэтому:
- Нужно вызывать
delay(0)/yield()до и после тяжёлых блоков кода и/или внутри них - Нужно обязательно вызывать
delay(0)/yield()в глухих циклах ожидания - Не рекомендуется использовать задержку
delayMicroseconds()более чем на20 000мкс
while (some_condition) {
// ...
delay(0);
}yield();
тяжёлая_функция();
yield();Если этого не делать - МК перезагрузится с ошибкой WDT reset
analogRead() #
ESP8266 имеет крайне убогий одноканальный АЦП:
- Сам АЦП в esp8266 может измерять напряжение в диапазоне 0.. 1.0V. На платах (NodeMCU, Wemos Mini) стоит делитель напряжения, который расширяет диапазон до более удобных 3.3V
- Разрешение - 10 бит (значения
0.. 1023) - Частый вызов
analogRead()замедляет работу WiFi. При вызовах чаще нескольких миллисекунд WiFi полностью перестаёт работать - Результат
analogRead()имеет кеширование до 5 мс, то есть полученные данные могут запаздывать на это время - АЦП может использоваться для измерения напряжения питания МК: для этого нужно вызвать
ADC_MODE(ADC_VCC);доvoid setup()(просто в коде программы, вне функций), а само напряжение питания можно получить изESP.getVcc()
analogWrite() #
- Работает на всех пинах, кроме
GPIO16 - ШИМ реализован программно, поэтому на повышенной частоте и разрядности будет тормозить выполнение программы
- Частота по умолчанию 1 кГц
- Частоту можно настроить в
analogWriteFreq(100.. 40000 Гц)
- Частоту можно настроить в
- Разрядность по умолчанию 8 бит (0.. 255) на версиях ядра 3.x. На ранних версиях - 10 бит (0.. 1023)
- Разрядность можно настроить в
analogWriteResolution(4...16 бит)
- Разрядность можно настроить в
Serial (UART) #
- В отличие от реализации для AVR, можно изменить размер буфера на приём:
Serial.setRxBufferSize(размер)в байтах. Вызывать передSerial.begin(), по умолчанию 256 байт - Можно настроить работу только на приём или только на отправку для освобождения пина:
Serial.begin(скорость, SERIAL_8N1, mode), гдеmode:SERIAL_TX_ONLY- только отправкаSERIAL_RX_ONLY- только приёмSERIAL_FULL- приём и отправка (по умолчанию)
- Можно перенести
Serialна другие пины при помощиSerial.swap(), вызывать послеSerial.begin(). Пины переместятся на GPIO15/D8 (TX) и GPIO13/D7 (RX). Если вызвать ещё раз - переместятся обратно на GPIO1 (TX) и GPIO3 (RX) и так по кругу - У esp8266 есть второй аппаратный UART, но его приёмная нога (RX) занята одним из пинов для работы с памятью и не выведена на плате Wemos Mini. Нога TX находится на GPIO2/D4, то есть можно работать только на отправку, но на практике и это может пригодиться. В программе просто работаем с объектом
Serial1, настроив его только на отправку
При перезагрузке ESP8266 отправляет в UART информацию о перезапуске на скорости 74880, что при другой скорости монитора выглядит как набор битых символов
Сон #
ESP8266 могут "спать" в режиме максимального энергосбережения, но из коробки это реализовано не очень удобно:
- Спать можно на максимальный период около 3.5 часов
- Время сна выдерживается с большой погрешностью
- Пробуждение запускает программу заново (в отличие от AVR, где пробуждение продолжает программу со следующей после сна строки)
Для более удобного сна можно использовать мою библиотеку EspSleep - она позволяет спать на любой период и делать это с хорошей точностью, но пробуждение всё ещё будет запускать программу заново.
Также у ESP есть возможность сохранять переменные в отдельную область памяти, которая сохраняется на период сна - это позволяет немного компенсировать неудобный сон с точкой пробуждения в начале программы. Для более удобной работы с этой памятью можно использовать мою библиотеку rtc_utils.
Полезные страницы #
- Набор GyverKIT – наш большой стартовый набор Arduino, продаётся в России
- Каталог ссылок на дешёвые Ардуины, датчики, модули и прочие железки с AliExpress
- Обратная связь – сообщить об ошибке в уроке или предложить дополнение по тексту ([email protected])
- Поддержать автора за работу над уроками