
У вас наверняка есть настольные часы-будильник с датчиком температуры и влажности, которые работают на двух пальчиковых батарейках уже не первый год и даже не планируют разряжаться. В то же время, если подключить плату Ардуино к "паурбанку" на 10 Ампер*часов, она высосет его за две недели. Как же так вышло?! Разработать энергоэффективное автономное устройство на Ардуино или голом микроконтроллере гораздо труднее, чем питающееся от "сети": потребление схемы складывается из большого количества факторов: как аппаратных, так и программных. В этом уроке мы постараемся рассмотреть их все. Основные моменты энергосбережения:
- Правильно подобрать источник питания по напряжению
- Минимизировать и оптимизировать потребление пассивных компонентов (стабилизаторы напряжения, светодиоды индикации, делители напряжения и т.д.)
- Задать оптимальный режим работы устройства и отдельных его частей: максимальное энергосбережение бОльшую часть времени работы, пробуждение по внешним событиям или таймеру, работа различных компонентов по расписанию и т.д. Например: опрос датчика и отправка данных по радио раз в минуту, всё остальное время - максимальный сон МК и отключение датчика и радио от питания
- Что касается сна самого МК - спать можно при помощи встроенных команд (например ассемблерной
asm("sleep")илиsleep_mode()изavr/sleep.h), а можно использовать библиотеки. Например есть стандартнаяavr/sleep.h, которая идёт в комплекте со средой разработки. Из нестандартных есть весьма популярные Narcoleptic и Low-Power, имеющие гораздо бОльшие возможности по настройке сна. Мы сделали свою библиотеку для управления энергосбережением МК - GyverPower, которая включает в себя удобное управление сном и энергопотреблением МК на всех уровнях (сон, управление частотой и периферией), а также встроенный калибровщик сторожевого таймера и несколько уникальных фишек, которых нет ни в каких других библиотеках. В данном уроке я буду ссылаться именно на неё. - Также потребление МК сильно зависит от частоты. Можно понижать частоту между периодами активной работы (вычислений, работы с датчиками), об этом читай ниже
Вольты, амперы, ёмкость #
Начнем с базовых понятий мира электричества: Вольты и Амперы (более подробно про это читай в этом уроке). Вольты - напряжение, оно же разность потенциалов. Напряжение задаёт источник питания, например батарейка или блок питания. Амперы - сила тока в цепи, показывает с какой силой "расходуется" электрическая энергия. Ток в цепи задаёт потребитель.
Ёмкость аккумуляторов часто указывают в Амперчасах - это запас электрического заряда, а не энергии. Для сравнения аккумуляторов с разным напряжением используют Ваттчасы. Допустим, ёмкость аккумулятора составляет 1 Ач. В идеальном расчёте он сможет отдавать ток 1 Ампер в течение одного часа, а при токе 0.5 А его хватит на 1 Ач / 0.5 А = 2 часа. Плата Ардуино потребляет в районе 24 мА, то есть тот же условный аккумулятор сможет питать её в течение 1000 мАч / 24 мА ~ 42 часов. В реальности результат зависит от режима разряда, температуры, преобразователей и допустимого конечного напряжения. При параллельном подключении потребителей ток суммируется. Если добавить дисплей с подсветкой на 30 мА, то схема проработает примерно 1000 мАч / (24 + 30 мА) ~ 18.5 часов.
Потребление компонентов схемы #
Если в устройстве помимо МК есть какие-то другие модули/датчики/дисплеи/микросхемы, то больший вклад в потребление энергии будут вносить именно они, потому что МК можно погрузить в сон, а их - не всегда. Логично, что для максимальной экономии энергии нужно держать все компоненты в полностью отключенном состоянии и включать только на период активной работы: датчики - на время опроса, дисплеи и подсветки - на время взаимодействия с человеком и тому подобное.
- Некоторые железки имеют очень удобный пин EN - enable, позволяющий логическим уровнем с МК полностью включать и выключать компонент, что позволяет очень просто управлять его состоянием
- Некоторые микросхемы имеют встроенный режим энергосбережения, который можно активировать из программы (например, передав нужную команду по интерфейсу связи). Информацию нужно искать в даташите или библиотеке на конкретную железку
- Если таких возможностей у железки нет - всегда можно просто разорвать ей питание при помощи транзистора или оптопары. Электромеханическое реле использовать не рекомендуется, т.к. оно само потребляет приличный ток
- Некоторые маломощные компоненты можно питать от GPIO, если их пусковой и рабочий токи укладываются в ограничения конкретного МК. Для ATmega328P 40 мА на пин - абсолютный предел, а в обычной схеме лучше не превышать примерно 20 мА и учитывать суммарный ток портов. У STM32, ESP и других МК ограничения отличаются, их нужно смотреть в документации на конкретный чип
- Большинство "интерфейсных" микросхем при сбросе питания будут требовать повторной инициализации. У того же например lcd дисплея после отключения и включения питания нужно вызвать метод
init(), чтобы дисплей начал реагировать на остальные команды - Если система измеряет напряжение питания выше 5V (напряжение батареи аккумуляторов), то делитель напряжения должен быть рассчитан оптимально, чтобы не тратить ток вхолостую
Потребление платы Ардуино #
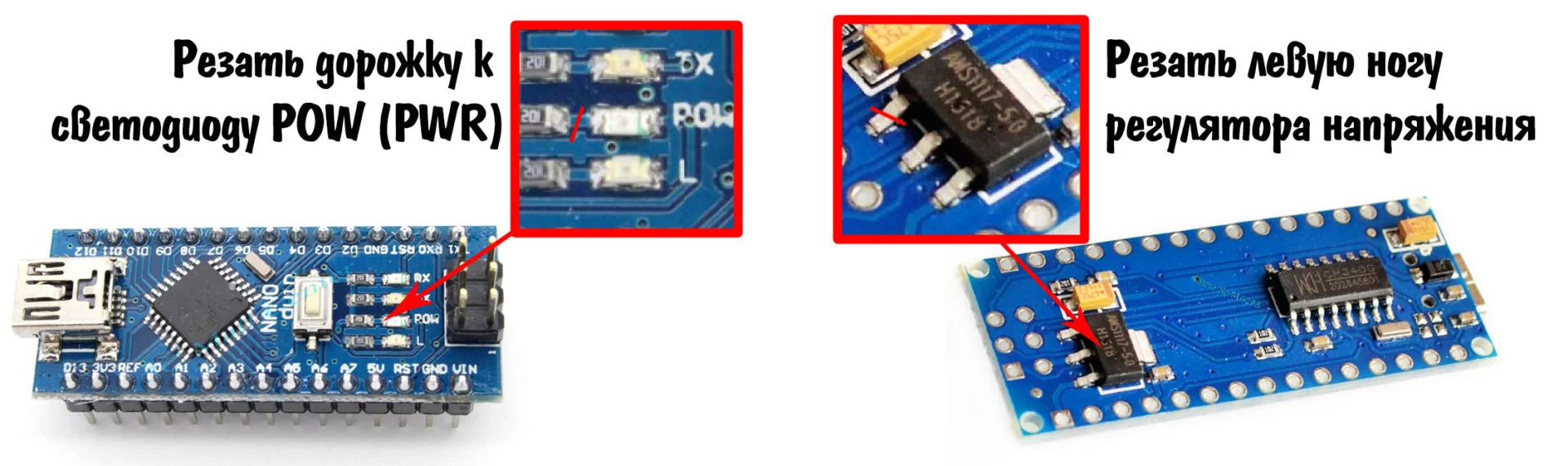
Честно говоря, сам микроконтроллер может работать абсолютно самостоятельно просто при наличии питания, а смена режима сна или частоты будет влиять на потребление ровно так, как написано в даташите. Если в основе проекта лежит плата ардуино - начинаем загибать пальцы: светодиоды индикации, стабилизатор питания и usb-ttl преобразователь - все они потребляют ток в холостом режиме, просто потому что они сидят на общем питании. Плата Nano в активном режиме потребляет около 24 мА, а если погрузить МК в максимальный сон - в районе 5 мА. В то же время по даташиту МК в таком режиме должен потреблять в районе 1 мкА, то есть в 5000 (пять тысяч) раз меньше! Эти самые 5 мА потребляют перечисленные выше компоненты на плате ардуино, поэтому для создания действительно энергоэффективного проекта нужно делать свою плату и паять на неё МК, либо брать скальпель/паяльник и убирать лишнее с платы Ардуино:
Потребление МК #
Частота тактирования #
Вычислительное ядро потребляет энергию всегда, когда находится в активном режиме: вычисляет ли программа арккосинус, ожидает ли окончание задержки delay(), висит ли в бесконечном пустом for(;;) - неважно. Потребление будет одинаковым во всех случаях, пока ядро тактируется. Более того, от частоты тактирования зависит напряжение, при котором МК гарантированно стабильно работает. Вот картинка из даташита на ATmega328:
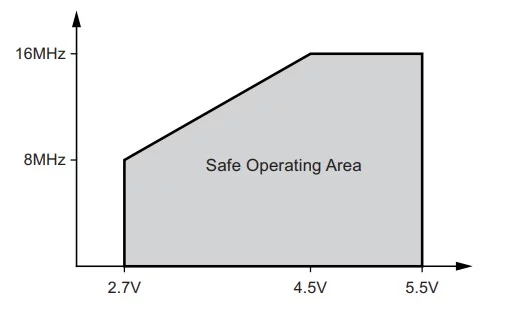
Некоторые экземпляры могут работать на 16 МГц от 3.3V, но это выходит за гарантированную область из даташита и не подходит для надёжного устройства. На 8 МГц ATmega328P может работать при более низком напряжении, точную границу нужно смотреть на графике и учитывать настройку BOD. Есть четыре уровня управления тактовой частотой:
- Подключение внешнего кварца с нужной частотой (на плате Ардуино стоит 16 МГц, сам МК поддерживает вплоть до 20 МГц без разгона).
- Выбор источника тактирования при помощи фьюзов: внешний (частота соответствует установленному генератору) и внутренний (8 МГц).
- Изменение системной частоты прямо из программы: большинство МК AVR позволяют понизить приходящую с источника тактирования частоту, а именно - поделить (реализовано в GyverPower). Таким образом можно замедлить работу всего МК для уменьшения потребления энергии или увеличения стабильности работы от пониженного напряжения. Можно выполнить необходимые действия на высокой частоте, а затем понизить её до минимума до наступления внешних событий по прерываниям или по таймеру. На некоторых МК есть PLL, например ATtiny85 может использовать его для тактирования CPU на 16 МГц и быстрой периферии
- Фьюз
CKDIV8: системный делитель из предыдущего пункта автоматически устанавливается на 8 перед запуском МК. Это нужно для более надёжного старта при низком напряжении. Обычно используют так: МК стартует с CKDIV8 на пониженной частоте, измеряет напряжение питания, если оно достаточно высокое (аккумулятор не разряжен) частота выставляется на необходимую и работа продолжается. Иначе например можно всё выключить и уйти в сон.
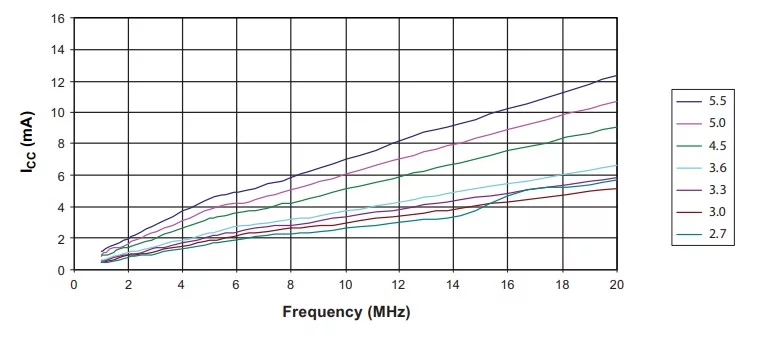
Также прилагаю картинку с графиками тока потребления МК в активном режиме (не во сне) в зависимости от частоты и напряжения питания:
Режимы энергосбережения #
У МК есть несколько режимов энергосбережения, в каждом из которых остаются в активном режиме только некоторые из аппаратных блоков (таймеры, интерфейсы, АЦП, и т.д.). Также у мк есть блок BOD, отвечающий за постоянный мониторинг напряжения и перезагрузку в случае его падения ниже настроенного порога. Во всех режимах сна остаётся активен АЦП, его нужно отключать отдельно (реализовано в GyverPower). Режимы энергосбережения МК (AVR):
IDLE- Легкий сон, отключается только клок CPU и Flash, пробуждается мгновенно от любых прерыванийPOWERDOWN- Наиболее глубокий сон, отключается всё кроме WDT и внешних прерываний, просыпается от аппаратных (обычных + PCINT) или WDT, пробуждение за 16+6 тактов (~1.375 мкс на 16 МГц). Прерывание должно быть длиннее этого времени для успешного пробуждения!STANDBY- Глубокий сон, похож на POWERDOWN, но основной генератор продолжает работать и поэтому пробуждение происходит быстрееPOWERSAVE- Глубокий сон, идентичен POWERDOWN + timer 2 активен (+ можно проснуться от его прерываний), можно использовать для счета времениEXTSTANDBY- Глубокий сон, похож на POWERSAVE, но основной генератор продолжает работать и поэтому пробуждение происходит быстрее
Самый часто используемый на практике режим - POWERDOWN, самый глубокий сон. В нём отключается всё, кроме watchdog и аппаратных прерываний (обычные external и PCINT). В данном режиме МК потребляет минимальный ток (ATmega328 - чуть меньше 1 мкА), а проснуться можно только по прерыванию Watchdog таймера или по аппаратному прерыванию (по кнопке). Очевидно, что в глубоком сне не работают таймеры и прерывания по ним, поэтому счёт времени становится отдельной задачей (в GyverPower эта задача решена максимально удобно).
Периферия #
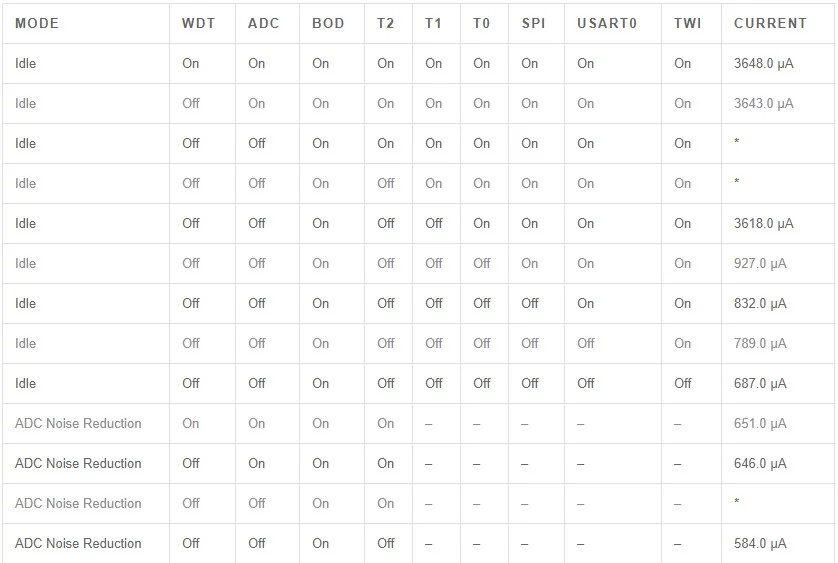
Помимо главного "ядра" у микроконтроллера есть куча периферийных блоков (АЦП, компаратор, таймеры, интерфейсы связи), которые по сути работают отдельно и могут общаться с МК на аппаратном уровне. Каждый блок потребляет некоторый ток, и при желании некоторые блоки можно отключить. В режиме глубокого сна они отключаются автоматически, а вот в активной работе нужно отключить их вручную. Большую таблицу с потреблением МК в разных режимах и с разным набором активной периферии можно посмотреть на официальной странице библиотеки Low Power, на всякий случай приложу её ниже. Управление периферией также реализовано в GyverPower.

Питание #
Источник питания #
Выбор источника питания очень важен для эффективного энергосбережения: максимально желательно питать МК напрямую от батарейки/аккумулятора:
- Трёх-четырёх АА/ААА батареек или аккумуляторов достаточно для работы на стандартной частоте 16 МГц (с 4-мя батарейками нужно быть аккуратнее по суммарному напряжению, а 4 никелевых аккумулятора подходят идеально).
- От одного литиевого аккумулятора (3.7-4.2V) можно работать на 16 МГц, но при разряде ниже 3.5V работа на такой частоте уже может быть не очень стабильной (частоту можно чуть понизить, об этом ниже).
- От литиевой 3V таблетки (CR2025, CR2032 и прочие) микроконтроллер отлично будет работать на внутреннем 8 МГц клоке.
- При выборе преобразователя или стабилизатора нужно смотреть его ток покоя и КПД при малой нагрузке: старые модели могут потреблять миллиамперы, а современные энергоэффективные - единицы микроампер. Но в любой ситуации нужно считать потребление и прикидывать время работы, для каких-то задач и работа от "Кроны" через стабилизатор будет приемлемой во имя упрощения схемы и стабильных 5 Вольт.
- Питать МК от одной банки последовательной аккумуляторной сборки не стоит - даже небольшой постоянный ток постепенно разбалансирует банки. Для питания логики используют преобразователь от всей сборки, а заряд, балансировку и защиту поручают подходящей BMS. Сам МК может контролировать напряжение, но без силовых ключей и схемы защиты полноценной BMS не является. Про измерение напряжения мы говорили в уроке про аналоговые входы.
- Также напомню, что питать всякие железки напрямую от МК можно только в некоторых пределах, подробнее о них и вообще питании проекта мы говорили в уроке о питании Ардуино и схемы в целом.
Самоблокировка питания #
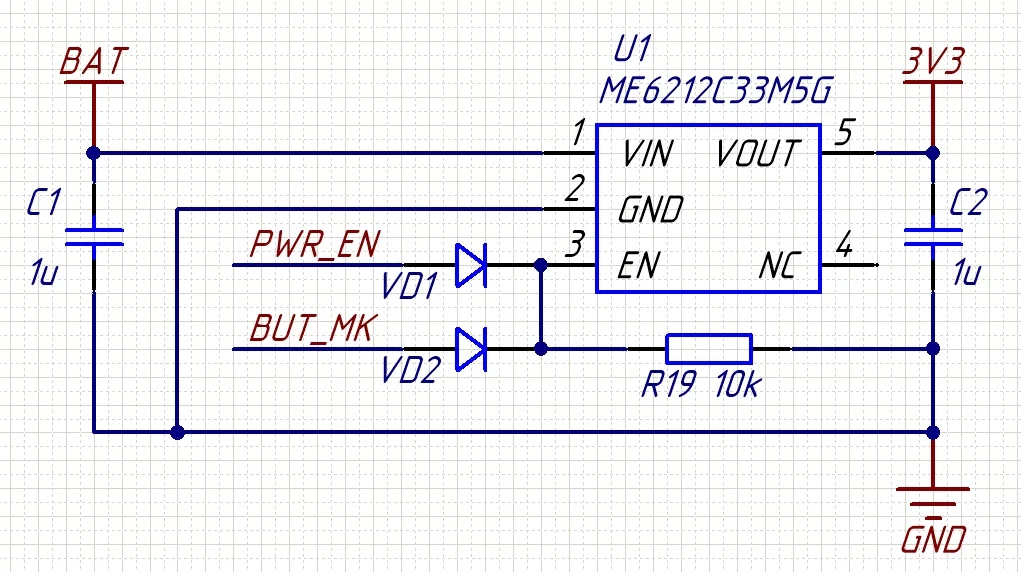
Самый надёжный и аппаратно простой способ сэкономить энергию - самоблокировка питания. Он подходит для устройств, которые включаются тактовой кнопкой (без фиксации) и через некоторое время должны сами отключиться до следующего клика по кнопке. Самоблокировка работает следующим образом: нажатие на кнопку подаёт ток на МК, он запускается, подаёт сигнал на "ключ", который запараллеливает линию питания. Мы отпускаем кнопку, а МК продолжает работать, потому что сам удерживает ключ, через который идёт питание. По тайм-ауту МК может отпустить ключ и отключиться. Проблема в том, что при снятом основном питании ток может пойти в AVR через защитный диод любого GPIO. Это паразитное питание, его нельзя использовать как штатный режим, но из-за него многие старые схемы самовыключения не отключаются полностью.
Но есть шикарный, простой и рабочий вариант: использовать стабилизатор напряжения с пином Enable, за который МК может "заблокировать" себе питание (за идею спасибо Дмитрию Карманову). Вот пример со стабилизатором me6212c33m5g на 3.3V (стоит в районе 15 руб). На схеме PWR_EN ведёт на физическую кнопку, подключенную второй ногой к питанию (батарейке), BUT_MK идёт на пин МК, который будет подавать высокий сигнал при запуске. 3V3 соответственно линия 3.3 (от неё питается сам МК и опционально что-то ещё), и BAT - батарейка:
Полезные страницы #
- Набор GyverKIT – наш большой стартовый набор Arduino, продаётся в России
- Каталог ссылок на дешёвые Ардуины, датчики, модули и прочие железки с AliExpress
- Обратная связь – сообщить об ошибке в уроке или предложить дополнение по тексту (alex@alexgyver.ru)
- Поддержать автора за работу над уроками