
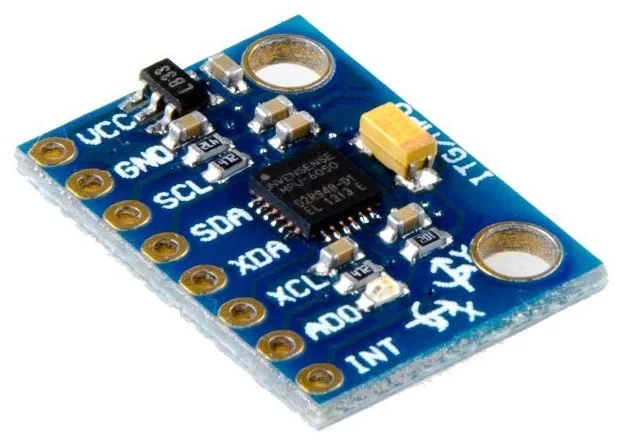
MPU6050 – трёхосевой осевой датчик ускорения (акселерометр) и угловой скорости (гироскоп). Используется для получения информации о положении в пространстве, движении, в системах инерциальной навигации, также может быть использован как высокочувствительный датчик вибрации и удара. Микросхема гораздо умнее, чем кажется на первый взгляд: там есть встроенный процессор, который можно программировать.
| В наборе GyverKIT | Aliexpress | |
|---|---|---|
 |
START |
Купить |
Характеристики датчика:
- Питание: 2.3.. 3.5V
- Диапазон ускорений: от ±2g до ±16g
- Диапазон угловых скоростей: от ±250 град/с до ±2000 град/с
- Интерфейс: I2C
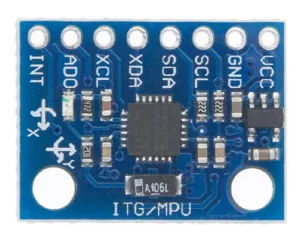
На модуле выведены:
- VCC и GND: питание 3.. 5V (на модуле стоит стабилизатор)
- SDA и SCL: вывод шины I2C для связи с МК
- XDA и XCL: позволяют подключать к модулю другие датчики (например, магнитометр)
- AD0: выбор адреса. Никуда не подключен: 0x68, подтянут к VCC – 0x69
- INT: пин прерывания готовности (поведение настраивается в программе)
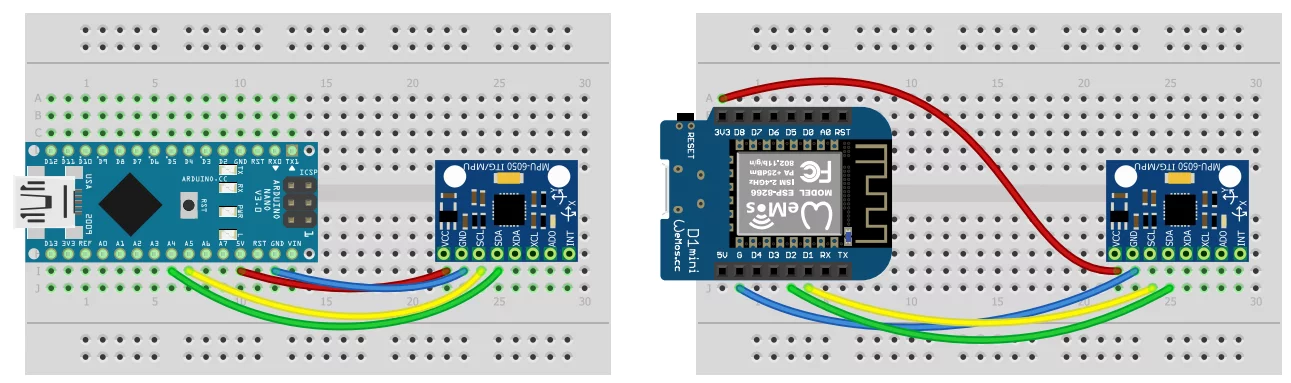
Подключение к Arduino #
Модуль подключается по шине I2C, выведенной на пины:
- Arduino: SDA – A4, SCL – A5
- Wemos: SDA – D2, SCL – D1
Программирование #
По работе с датчиком у меня есть отдельная большая статья
Напрямую #
#include <Wire.h>
#define MPU_ADDR 0x68
#define MPU_PWR_MGMT_1 0x6B
#define MPU_ACCEL_XOUT_H 0x3B
// включить mpu
void MPU_init() {
Wire.beginTransmission(MPU_ADDR);
Wire.write(MPU_PWR_MGMT_1);
Wire.write(0);
Wire.endTransmission();
}
// запросить данные
bool MPU_read(int data[7]) {
Wire.beginTransmission(MPU_ADDR);
Wire.write(MPU_ACCEL_XOUT_H);
Wire.endTransmission(false);
if (Wire.requestFrom(MPU_ADDR, 14) == 14) {
for (byte i = 0; i < 7; i++) {
data[i] = (Wire.read() << 8) | Wire.read();
}
return true;
}
return false;
}
void setup() {
Serial.begin(115200);
Wire.begin();
}
void loop() {
int data[7];
if (MPU_read(data)) {
// здесь data:
// [accX, accY, accZ, temp, gyrX, gyrY, gyrZ]
// acc - ускорение, gyr - угловая скорость, temp - температура (raw)
for (byte i = 0; i < 7; i++) {
Serial.print(data[i]);
Serial.print('\t');
}
Serial.println();
} else {
Serial.println("MPU read error");
}
delay(100);
}Библиотеки #
С модулем можно работать при помощи библиотеки от i2cdev: качаем весь архив, из него достаём Arduino/I2Cdev и Arduino/MPU6050, кладём себе в папку с библиотеками.
Получаем сырые значения по осям
// Простой пример с получением и выводом ускорений и угловых скоростей в порт
#include <I2Cdev.h>
#include <MPU6050.h>
MPU6050 mpu;
void setup() {
Wire.begin();
Serial.begin(115200);
mpu.initialize();
// состояние соединения
Serial.println(mpu.testConnection() ? "MPU6050 OK" : "MPU6050 FAIL");
delay(1000);
}
void loop() {
int16_t ax, ay, az;
int16_t gx, gy, gz;
mpu.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
Serial.print(ax); Serial.print('\t');
Serial.print(ay); Serial.print('\t');
Serial.print(az); Serial.print('\t');
Serial.print(gx); Serial.print('\t');
Serial.print(gy); Serial.print('\t');
Serial.println(gz);
delay(5);
}Получаем углы поворота
// Более сложный пример, получаем отфильтрованные углы по трём осям
#include "I2Cdev.h"
#include "MPU6050_6Axis_MotionApps20.h"
MPU6050 mpu;
uint8_t fifoBuffer[45]; // буфер
void setup() {
Serial.begin(115200);
Wire.begin();
//Wire.setClock(1000000UL); // разгоняем шину на максимум
// инициализация DMP
mpu.initialize();
mpu.dmpInitialize();
mpu.setDMPEnabled(true);
}
void loop() {
static uint32_t tmr;
if (millis() - tmr >= 11) { // таймер на 11 мс (период готовности значений)
if (mpu.dmpGetCurrentFIFOPacket(fifoBuffer)) {
// переменные для расчёта (ypr можно вынести в глобал)
Quaternion q;
VectorFloat gravity;
float ypr[3];
// расчёты
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
// выводим результат в радианах (-3.14, 3.14)
Serial.print(ypr[0]); // вокруг оси Z
Serial.print(',');
Serial.print(ypr[1]); // вокруг оси Y
Serial.print(',');
Serial.print(ypr[2]); // вокруг оси X
Serial.println();
// для градусов можно использовать degrees()
tmr = millis(); // сброс таймера
}
}
}Полезные страницы #
- Набор GyverKIT – наш большой стартовый набор Arduino, продаётся в России
- Каталог ссылок на дешёвые Ардуины, датчики, модули и прочие железки с AliExpress
- Обратная связь – сообщить об ошибке в уроке или предложить дополнение по тексту ([email protected])
- Поддержать автора за работу над уроками
