
Переменная (variable) - ячейка памяти с заданным именем, по которому к ней можно обратиться для записи и чтения данных.
C/C++ - язык со статической типизацией. У переменной при создании указывается тип и она сохраняет его на всём протяжении своего существования. Если в переменную записать данные другого типа - они будут по возможности преобразованы к типу самой переменной, если это невозможно - будет ошибка компиляции. В других языках, например Python или JavaScript, типизация динамическая, то есть в одну и ту же переменную можно записывать данные разных типов и она каждый раз будет менять свой тип на новый.
Переменные #
Создание переменной #
Переменная создаётся при помощи конструкции тип_данных имя;, это действие называется определением переменной (definition). Само имя подчиняется правилам, описанным в уроке про базовый синтаксис (только англ. символы, цифры и подчёркивание, не начинается с цифры):
int a;
uint8_t b;
float c;В этот момент процессор выделяет память под размер указанного типа по следующему свободному адресу в памяти и даёт его нам под управление по указанному имени
Можно создать несколько переменных одного типа, указав их через запятую:
int a, b, c;
float d, e, f;Присвоение значения #
Переменной можно присвоить (записать) данные при помощи оператора = из:
- Численной константы
- Другой переменной
- Результата функции
- Логического и арифметического выражения
int a;
a = 123;
a = 0xff + 123;
a = b;
a = b + 10;
a = foo();Переменная может использоваться только после создания - код программы выполняется сверху вниз и нельзя работать с тем, что ещё не существует:
{
//var = 4; // ошибка!
int var;
var = 3;
}Переменная может хранить данные только своего типа, поэтому присвоенные данные будут принудительно сконвертированы в её тип:
- Если
boolпеременной присвоить0- она будетfalse(0). Если любое отличное от нуля значение - она будетtrue(1):
bool v;
v = 0; // == false
v = 1; // == true
v = -9; // == true- Если целочисленной переменной присвоить значение больше, чем она может хранить - в неё запишутся только младшие байты, которые поместятся в текущий тип:
uint8_t v; // 1 байт
v = 123; // == 123
v = 0xAB; // == 0xAB (1 байт записался)
v = 0xABCD; // == 0xCD (2 байта, но записался 1)- Если целочисленной переменной присвоить значение меньшего размера - лишние байты "слева" будут заполнены нулями, т.е. число запишется полностью корректно:
uint16_t v; // 2 байта
// пишем 1 байт
v = 0xAB; // == 0xAB == 0x00AB- Если беззнаковой переменной присвоить отрицательное значение - оно бинарно запишется как знаковое по правилам хранения знаковых чисел, то есть в результате получится некорректное число:
uint16_t v;
v = -10; // == 65413- Если целочисленной переменной присвоить
float- дробная часть будет отброшена, а не округлена:
uint16_t v;
v = 3.8; // == 3- Если переменной
floatприсвоить целочисленный тип - он конвертируется во float с нулевой дробной частью
float v;
v = 3; // ~ 3.0Инициализация переменной #
Переменной можно присвоить значение и при создании, такой процесс называется инициализацией: тип_данных имя = значение;
int a = 1234;
float b = 3.14;
bool v = false;При создании нескольких переменных одного типа можно выборочно их инициализировать:
int a, b = 123, c; // a и c - не инициализированы
float d = 3.14, e, f = 0.25;Также в C/C++ есть синтаксис инициализации при помощи фигурных скобок - {}, он обычно используется для инициализации составных типов данных (массивов, структур, объединений), но для простых типов данных это тоже работает:
int b{3}; // b равно 3В C++ все базовые типы данных для совместимости с классами поддерживают вызов конструктора - инициализация через круглые скобки ():
int c(3); // c равно 3Все эти способы равноценны и встречаются в чужом коде, но по стандарту лучше использовать знак =:
int a = 3;
int b{3};
int c(3);Преобразование типов #
Переменную можно вручную преобразовать к другому типу. В этом случае можно считать, что получится новая временная переменная указанного типа - старая переменная никак не изменяется, преобразование работает только на результат. Преобразование можно выполнять несколькими способами:
(тип)переменная- в Си стилетип(переменная)- в C++ стилеstatic_cast<тип>(переменная)- через C++ функциюstatic_cast
В следующем примере преобразования "лишние" - если их убрать, то ничего не изменится - компилятор сделает те же самые преобразования при присвоении:
int a = (int)123.4;
float f = float(a);
int b = static_cast<int>(f);Вес переменной #
Узнать вес переменной из программы можно при помощи оператора sizeof:
short a;
sizeof(a); // 2 байта
Область видимости #
Любая переменная имеет область видимости (scope) - часть программы, в пределах которой есть доступ к этой переменной. Переменную "видно" из текущей строки кода то есть к ней можно обратиться для чтения и записи. Есть два варианта - глобальная и локальная области видимости:
- Глобальная (global) - переменную видно из любой точки программы
- Локальная (local) - переменную видно внутри блока кода, в котором она создана, а также во всех вложенных
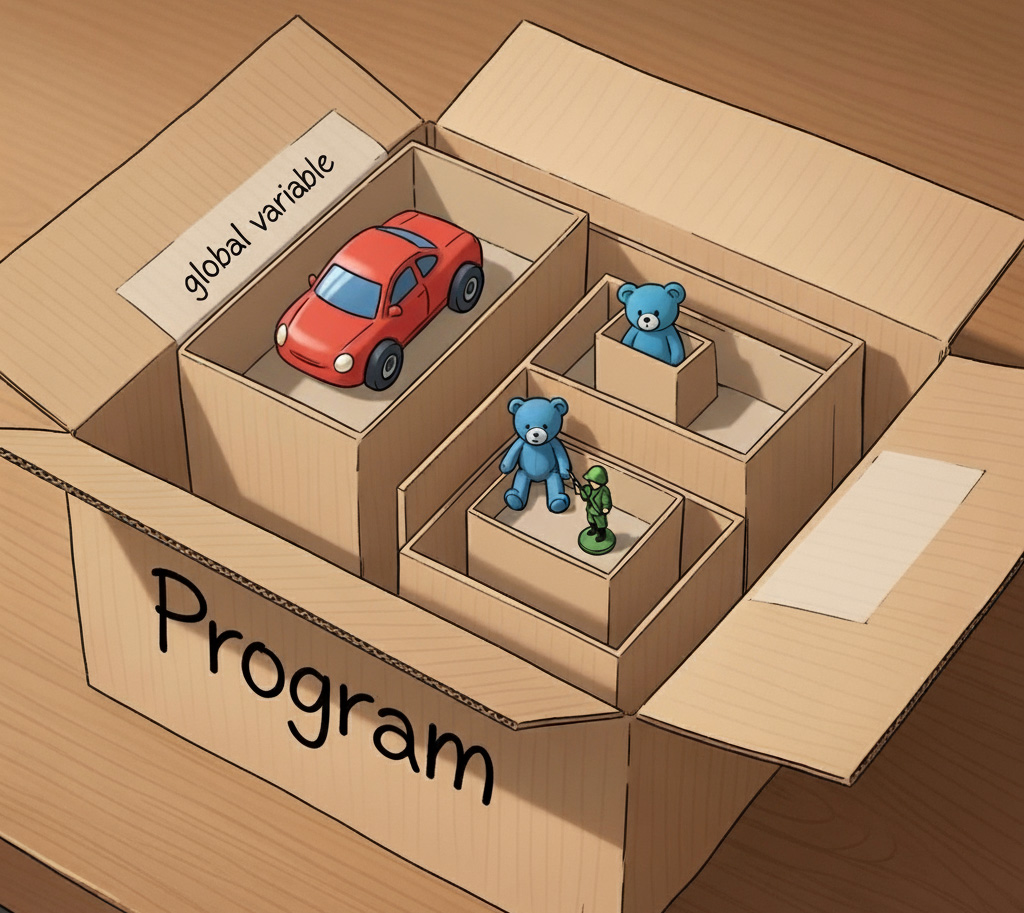
Если проводить аналогии, то блок кода - это коробка, переменная - игрушка, область видимости - пространство внутри коробки с игрушкой. В таком случае программа - это главная самая большая коробка, в которой находятся все остальные коробки (комната). Игрушку видно из коробки, в которой она лежит, а также изо всех коробок внутри этой коробки. Нельзя увидеть игрушку, находясь в соседней коробке. Игрушка, которая лежит в главной коробке, имеет глобальную область видимости, её видно изо всех коробок. Игрушки во вложенных коробках - локальную область видимости:
int global; // глобальная
int main() {
int local; // локальная
// global видно здесь
// local видно здесь
// local2 НЕ видно здесь
{
int local2; // локальная
// global видно здесь
// local видно здесь
// local2 видно здесь
}
// local2 НЕ видно здесь
}Глобальная переменная #
Создаётся на самом верхнем уровне программы, вне всех блоков кода и функций:
- Имеет глобальную область видимости - к ней можно обратиться из любого места в программе
- Выделяется в памяти однократно при запуске программы
- При создании автоматически инициализируется значением по умолчанию для своего типа данных - для численных типов это
0 - Существует в памяти на всём протяжении работы программы
- Компилятор может посчитать, сколько весят глобальные переменные - это будет минимальный объём памяти, который программа займет во время работы
int global1 = 0;
int global2; // автоматически инициализирована нулём (0)
int main() {
// global1 и global2 видно здесь
}Локальная переменная #
Создаётся внутри блока кода:
- Имеет область видимости внутри своего блока кода, а также во всех вложенных в него блоках
- Выделяется в памяти заново каждый раз в том месте, где создаётся
- При создании не инициализируется и имеет значение, которое находилось в этой области памяти на момент создания - по сути получает случайное значение. Это сделано с целью оптимизации: инициализация выполняется не мгновенно
- Автоматически удаляется из памяти при выходе из области определения, т.е. после закрывающей скобки
}своего блока
Локальные переменные в C/C++ являются автоматическими - удаляются из памяти при выходе из своей области видимости
{
int local1; // имеет случайное значение
int local2 = 0; // инициализация вручную
{
int local3;
// здесь существуют и доступны все: local1, local2, local3
}
// здесь local3 удаляется из памяти и больше недоступна
}
// здесь local1 и local2 удаляются из памяти и больше недоступныНужно обязательно инициализировать локальную переменную, если дальше по коду под её значением подразумевается 0, например для счётчика
Интересный момент - тип bool при явном преобразовании и присвоении автоматически принимает значение 0 и 1. А вот если создать его локально и не инициализировать - он хранит случайное 1-байтное число, а не только ноль и единицу.
Статическая переменная #
Cоздаётся как локальная (внутри блока кода), но с ключевым словом static:
- Имеет локальную область видимости, как локальная
- Выделяется в памяти однократно при запуске программы, как глобальная
- Сама инициализируется значением по умолчанию, как глобальная
- Ручная инициализация выполнится только один раз при запуске программы
- Не удаляется из памяти и сохраняет значение на протяжении работы программы, как глобальная
{
static int var; // инициализирована 0
}
// здесь var уже недоступна, но существует в памяти и хранит значениеЕсли глобальная переменная объявлена со словом static - она будет доступна только внутри текущего исходного файла. Подробнее об этом - в уроке о структуре проекта
Наглядный пример отличия локальной переменной от статической:
{
int local = 10; // каждый раз инициализируется ЗАНОВО
// здесь local ВСЕГДА равна 10
local = local + 1;
// здесь local равна 11
static int local_st = 10; // инициализируется ТОЛЬКО ПРИ ЗАПУСКЕ программы
local_st = local_st + 1;
// здесь local_st увеличивается на 1 с каждым вызовом (11, 12, 13, 14...)
}
// здесь local удаляется из памяти
// здесь local_st существует, но недоступна (вне области видимости)Если вызвать этот блок кода несколько раз подряд, то локальная переменная всегда будет равна 10, а статическая начнёт увеличиваться на единицу с каждым вызовом!
Конфликт имён #
Нельзя создавать переменные с одинаковыми именами и одинаковой областью видимости - будет ошибка компиляции. В то же время можно создавать переменные с одинаковыми именами и разной областью видимости - в этом случае новая переменная внутри своей области видимости "перекроет" имя старой. Перекрытие происходит в момент создания новой переменной:
int var; // #1 - глобальная
//int var; // ошибка, такое имя уже есть в этой области
int main() {
var = 1; // меняем ГЛОБАЛЬНУЮ var #1
int var; // #2 - "перекроет" глобальную var
var = 2; // меняем ЛОКАЛЬНУЮ var #2
{
int var; // #3 - перекроет локальную #2
var = 3; // меняем локальную var #3
}
var = 4; // меняем локальную var #2
//int var; // ошибка, уже есть в этом блоке - #2
}Константы #
Числа в программе #
Любое число в коде программы является константой соответствующего типа, компилятор сам определяет её стандартный тип следующим образом:
123; // const int, знаковая!
3.14; // const double
3.; // const doubleТакже можно явно указать конкретный тип при помощи литерала - буквенное обозначение в конце числа:
| Тип | Литерал |
|---|---|
unsigned int |
U, u |
long |
L, l |
unsigned long |
UL, ul |
long long |
LL, ll |
unsigned long long |
ULL, ull |
float |
f |
123u; // unsigned int
12345L; // long
0xabcdull; // long long
3.14f; // float
3.f; // floatconst-константы #
Константы (constant) нужны для удобства программиста, чтобы помечать данные, которые нельзя изменять. Константы позволяют:
- Запретить менять то, что менять нельзя. Это касается как своего кода, так и работы с чужими библиотеками, где могут быть
constсущности - Повысить читаемость программы и избавиться от "магических чисел" в коде: номеров пинов, адресов регистров, количества светодиодов в ленте и т.д.
По сути это переменная, которую можно использовать только для чтения. Ключевое слово const добавляется перед или после типа данных: const тип имя или тип const имя:
- Константа создаётся в памяти по тем же правилам, что и переменная, но с ключевым словом
const - Константа обязательно должна быть инициализирована значением соответствующего типа:
const тип_данных имя = значение; - Константа подчиняется тем же правилам области видимости, что и переменная
- Менять значение константы нельзя, на то она и константа. Любая попытка изменения значения константы приведёт к ошибке компиляции
Любое самостоятельное число в программе является константой соответствующего типа
//const int a; // ошибка, не инициализирована
const int b = 123;
b = 456; // ошибка, изменение константы
123 = 456; // ошибка, изменение константыКонстанта численного типа может быть "оптимизирована" компилятором - вырезана из программы и заменена своим значением, чтобы не занимать место в оперативной памяти:
const float pi = 3.14;
float a = pi * 2.0;
// скорее всего компилятор просто заменит константу pi на число 3.14define-константы #
Есть ещё инструмент define - он работает на уровне препроцессора, то есть напрямую с текстом программы. Данная команда работает как поиск и замена по тексту программы и часто используется для создания констант в Си. Подробнее читайте в уроке про директивы препроцессора:
#define MY_CONST 3.0
#define MY_CONST_1 123
void setup() {
Serial.begin(115200);
Serial.println(MY_CONST); // вывод 3.0
int a = MY_CONST_1;
Serial.println(a); // вывод 123
}
void loop() {
}define - очень мощный и опасный инструмент, он заменяет непосредственно указанный текст программы на другой текст и не является типом данных, не создаёт никаких новых данных и типов. Процесс поиска и замены выполняется перед компиляцией, т.е. в код программы подставляются указанные значения. define может очень легко сломать программу, поэтому использовать его нужно с осторожностью и выбирать максимально уникальные имена констант - их принято писать ЗАГЛАВНЫМИ_БУКВАМИ.
constexpr-константы #
В C++ есть инструмент constexpr, он позволяет создавать константы и функции, которые выполняются и считаются на этапе компиляции, что позволяет облегчить и оптимизировать программу. В большинстве случаев это более правильная и безопасная замена define-константам и макросам, подробнее читай в уроке про constexpr. Все варианты констант:
#define CONST_DEF 123
const int CONST_INT = 123;
constexpr int CONST_EXPR = 123;
void setup() {
Serial.begin(115200);
Serial.println(CONST_INT);
Serial.println(CONST_DEF);
Serial.println(CONST_EXPR);
}
void loop() {
}"Магические" числа #
Числа в коде программы, смысл и назначение которых не понятны из контекста, называются "магическими" (magic numbers). Использование таких чисел является плохой практикой и ухудшает читаемость программы, вынуждает писать дополнительные комментарии к коду. А если это чужой код без комментариев - поди разберись, что имел в виду уважаемый автор. Магические числа нужно задавать константами, тогда код станет самодокументированным:
// под setPin() подразумевается подача напряжения на пин контроллера
// что здесь происходит, кого включаем?
setPin(3);
// понятно, но избыточно
setPin(3); // подать питание на светодиод// другое дело, понятно без комментариев
const int LED_PIN = 3;
setPin(LED_PIN);Подобные константы обычно объявляются в самом начале файла с программой
Автоматический тип #
C/C++ поддерживает автоматическую типизацию переменных, для этого нужно указать тип auto при инициализации переменной (переменная типа auto должна быть инициализирована), чтобы компилятор косвенно понимал, какой тип в ней будет храниться:
auto a = 12345; // int
auto b = 12345L; // long
auto bb = b; // long
auto c = 3.14; // double
auto d = 3.14f; // float
auto e; // ошибка! Не инициализированоЭто также позволяет визуально сократить программу в ситуациях, когда нужно создать переменную какого-то пользовательского типа с длинным названием. Например, функция foo() возвращает данные типа my_very_fancy_type<blabla<XYZ_123>>*:
auto a = foo(); // здесь a имеет тип my_very_fancy_type<blabla<XYZ_123>>*Дополнительно #
Дополнительный контент доступен владельцам набора GyverKIT и по подписке, подробнее читай здесь. Блок содержит:
- Тезисы, Вопросы, Задания, Примеры (Arduino)
- 6 блоков кода
Полезные страницы #
- Набор GyverKIT – наш большой стартовый набор Arduino, продаётся в России
- Каталог ссылок на дешёвые Ардуины, датчики, модули и прочие железки с AliExpress
- Обратная связь – сообщить об ошибке в уроке или предложить дополнение по тексту ([email protected])
- Поддержать автора за работу над уроками
